MISSION UPDATES | October 26, 2022
Sols 3635-3636: Lumpy Bumpy
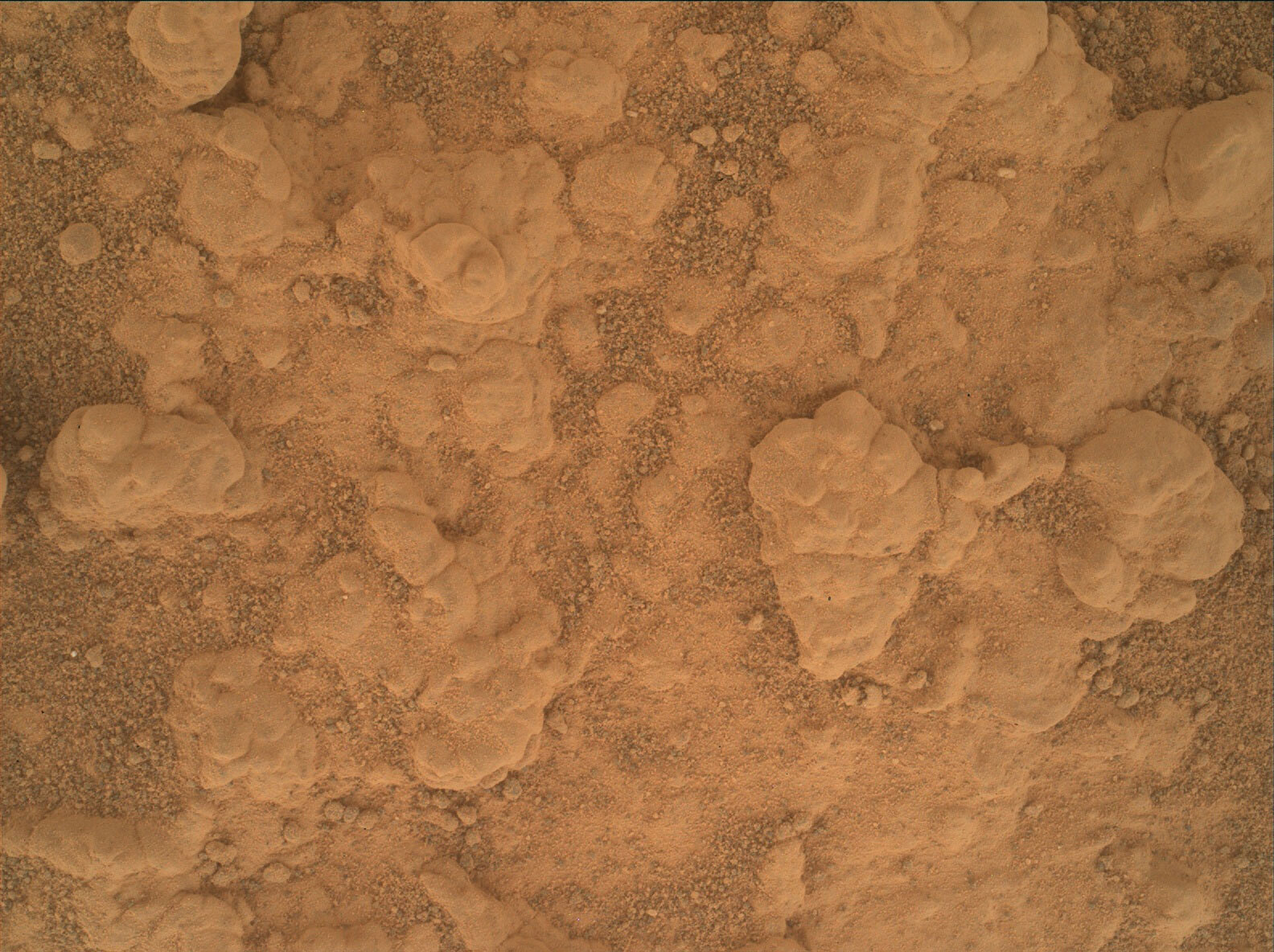
Using an onboard focusing process, the Mars Hand Lens Imager (MAHLI) aboard NASA's Mars rover Curiosity created this product by merging two to eight images previously taken by the MAHLI, located on the turret at the end of the rover's robotic arm. Credits: NASA/JPL-Caltech/MSSS. Download image ›
In today’s plan, we got to exercise our combined APXS-MAHLI touch and go capability. Now that our days on Mars are starting a bit earlier thanks to Earth rising earlier in the morning sky, APXS gets a cooler time to operate on days we also drive. So the APXS-MAHLI teams are back to being regular partners in exploration once again. Today’s workspace was much like our last one, lumpy and bumpy, as seen in the MAHLI 5 cm image above from our last workspace (for scale, the image is ~5 cm wide). Lumps and bumps like this are interesting because they suggest the bedrock did not sit around idly after formation - something stuck the grains of this rock a bit more tightly together than their neighboring grains, leading to more resistant lumps. APXS looks for the chemical fingerprint of what might have caused the lumps, and MAHLI gets to gaze at their intricate textures. Together we targeted a similar feature in today’s workspace, called “Mau.” MAHLI also had a look at linear depression in the sand around the workspace bedrock that had an interesting distribution of pebbles around its perimeter, called “Univini.”
ChemCam also got in on the lumpy bumpy fun, targeting a different lump from APXS and MAHLI at “Cumate.” They will also capture the ever-nearing marker band outcrop with a 12 image RMI mosaic. Mastcam will acquire an expansive stereo mosaic of the amazing scenery that we are driving into, and a single multispectral footprint within that scene on an apparently bright block, called “Maraca."
Our drive will continue our beeline west toward a spot where we can access the marker band and points beyond. After the drive, ChemCam will acquire an autonomously-targeted raster to give us an early look at our weekend home for science. Navcam will look for dust devils and clouds. Throughout the plan, we have multiple DAN passive measurements, punctuated by two DAN active measurements. REMS and RAD run steadily across both sols.