MISSION UPDATES | December 14, 2022
Sols 3682-3683: Perspective
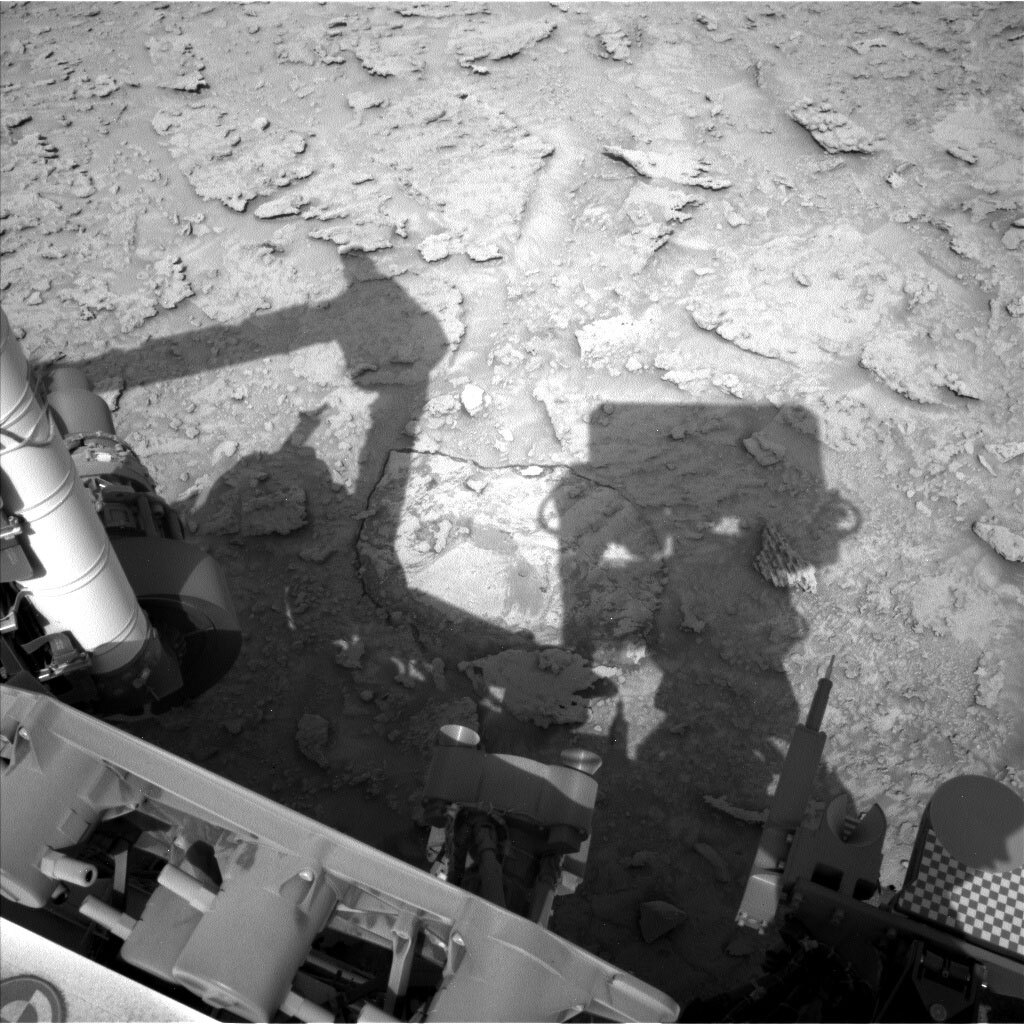
This image was taken by Left Navigation Camera onboard NASA's Mars rover Curiosity on Sol 3681. Credits: NASA/JPL-Caltech. Download image ›
In yesterday’s blog, Natalie Moore wrote of our continued attempts to drill “Amapari” and word from our beloved rover that our drill was still on the ground when data arrived from Mars. Today we received confirmation that the arm had retracted from the surface, exposing the hole that prompted an earlier than expected termination of our latest drill attempt. These latest data confirmed we did not reach the desired depth and there was insufficient sample in the drill stem for analysis by CheMin and SAM. As such, the team decided not to pursue portion characterization activities and is considering foregoing further drilling attempts here. Instead, we are considering potentially sampling from the “Marker Band” when we expect to cross it again during our continued traverse up Mount Sharp.
It is easy to look at the post-drill images acquired of the workspace, such as the one headlining this blog (with the rover’s shadow nicely framing our drilled bedrock, itself outlined from its surroundings by cracks or voids that formed under the duress of the rover’s interrogation attempt) and think we did not get what we wanted here. But that’s hardly the whole story. Our intrepid decade-plus-old rover did her job remarkably. She drilled into the rock, noticed something was not right, and stopped. These safety mechanisms are in place should a situation just like this occur, potentially preventing more dire issues from arising such as irreversible damage to rover hardware.
Our drilling efforts at Amapari prompted me to take a broader perspective and remember what we are doing at a fundamental level. It can be easy to take for granted many aspects of exploring with our rover, as if there’s a magic wand we wave and a day or two later juicy morsels of data come from Mars in various forms, confirming or contrasting scientific theories we may have. But there is no magic wand. Decades of hard work and meticulous planning went into crafting a spacecraft and gently landing it on the surface of another planet. Curiosity is commanded by a remarkable international team spanning numerous disciplines. Together, we make these plans a reality.
We are exploring another world through the digital eyes of cameras built over a decade ago. The images acquired provide us with the data we need to not only drive and conduct image-based science, but also to deploy our 2.3 meter long robotic arm, the end of which has a 30 kg toolbox (referred to as a turret) equipped with a high-resolution camera (MAHLI), an X-ray spectrometer (APXS), a brush (DRT), a scoop, and our percussion drill. The fact that we are able to place these instruments at the end of a long and massive arm, with cm-to-sub-cm accuracy, on another planet, using only images, is remarkable in and of itself, whether it be to drill, or, as in today’s plan, acquire high-resolution images and in situ compositional data.
In today’s plan we acquired MAHLI images of the Amapari drill hole and tailings, as well as APXS geochemical analyses of the tailings and nearby mini-drill. These activities are complemented by ChemCam and Mastcam images of our drill workspace; the team opted to forgo LIBS analyses of the drill tailings given the potential to redistribute the drill tailings ahead of our APXS activities. To me, today also served as a reminder to maintain perspective and to not take for granted the complexity of executing a plan, and to not forget how capable our rover and team are, especially when Mars seemingly has its own agenda. In the days or weeks ahead, we will leave this location. Fresh landscapes and discoveries compel us forward.