February 21, 2022
Sols 3391-3394: Rocky Road (But Not the Tasty Kind) For the Holiday

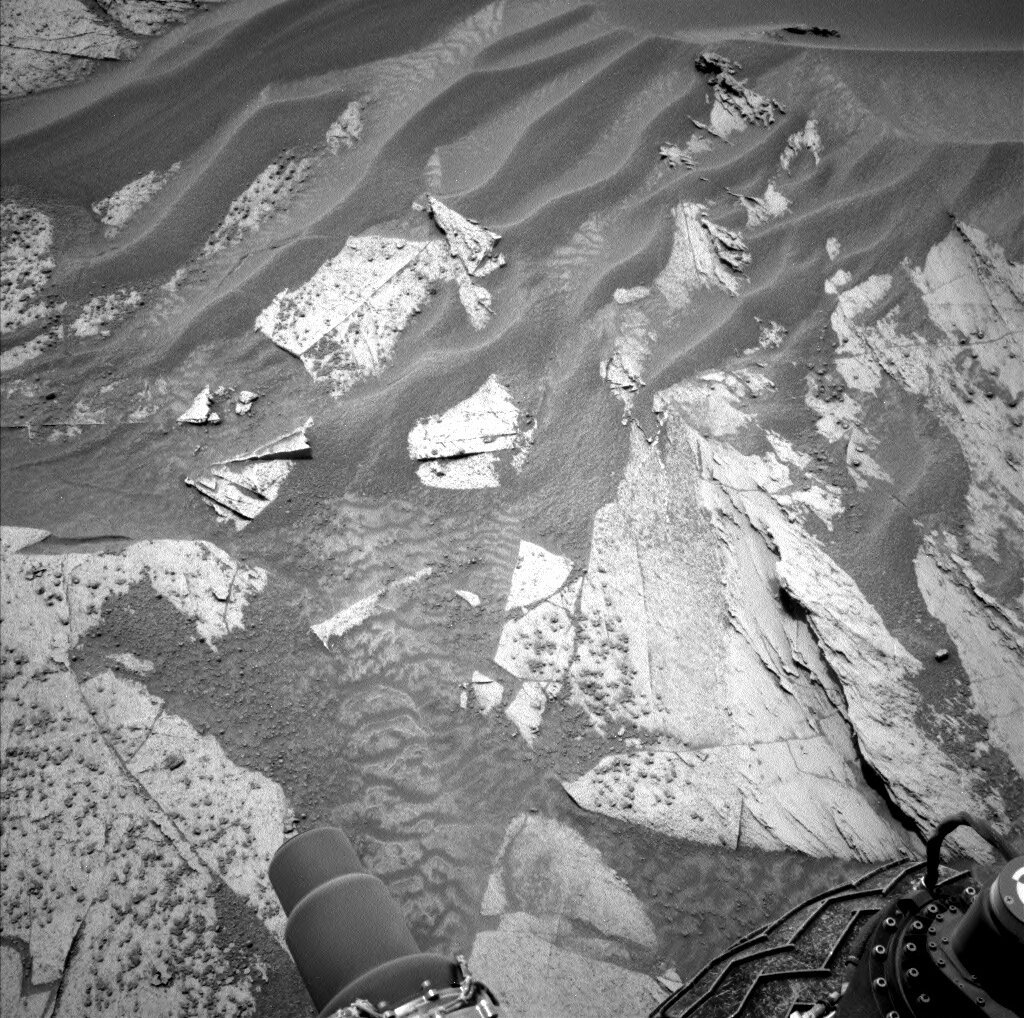
This image was taken by Right Navigation Camera onboard NASA's Mars rover Curiosity on Sol 3390. Credits: NASA/JPL-Caltech. Download image ›
MSL planning was met with beautiful images of our path ahead, like this one. We ended up planning to look at many of these rocks with our science instruments before driving on. This is a busy plan, covering four sols due to the holiday on Monday. In order to keep things manageable, especially given that our uplink is early tonight, we are doing all of our activities on the last 3 sols of the plan and leaving the first sol fairly empty.
On the second and third sols of the plan we are doing an extensive set of targeted science observations. ChemCam LIBS is sampling several rocks, including “Pickletillem Marsh” (a bedrock target near our next parking location), “Voxter Voe” (a rough, broken block with a dark coating), and “Nithsdale” a float rock. ChemCam is also taking an RMI mosaic of a nearby sedimentary feature called “Onich Dry Gorge.” Mastcam is targeting all of the ChemCam LIBS targets in order to help understand their compositions. But in addition, we are painting the area with Mastcam mosaics to document the Siccar Point group unconformity (a contact between underlying bright outcrop and the Stimson formation). We are taking a large mosaic of Onich Dry Gorge and a smaller mosaic of “Sango Bay” (which also includes an unusual float block). We also have a mosaic of the “Cio Mor Cliffs” area, which is another sedimentary butte structure. This large suite of observations should help us to better understand the unconformity and the context around it; unconformities are really interesting because they can represent significant gaps in time that could be associated with changes in the environment. There is also a multispectral image of “Tomnaverie,” which is in the workspace and also has a dark coating, and “Qui Ness” which is a field of loose rocks to the northeast.
In addition to all the ground targets, we have a lot of atmospheric observations, as there is a lot of dust in the air (as visible in the image). From our current location, we take a dust devil survey and a dust devil movie with Navcam. We also have some engineering maintenance activities sprinkled in the plan in order to help keep an eye on the health of our systems.
We Rover Planners were also kept busy planning both arm and drive activities. On the second sol, we did some contact science on “Foss Mine” (another dark-coated bedrock target in the workspace) and Nithsdale targets. We tried to find a rock large and smooth enough that we could brush it, but unfortunately, all the rocks we could reach were too small, too rough, and covered with pebbles. Once we decided to just use APXS and MAHLI, the rest of the arm planning was more straightforward. We did MAHLI and short APXS observations on both, and got a close 1cm approach and QRM images (Quantitative Relief Modeling, which uses 5 images instead of just a stereo pair to get a more accurate model of the surface).
Planning the drive, which is on the third sol, was definitely a challenge. Our stereo coverage of the terrain is very spotty due to all the rocks, which block us from seeing what’s behind them, and there is a lot of sand and many big rocks in the path ahead. Ultimately, working with the science team, we decided to park only a few meters away on a small rise (to the right of the large dark block in the center of the image). This will give us a good vantage point to look into the valley ahead and try to scope out our future route. We also needed to pick our parking position with care – we want to get some bedrock in our workspace for Tuesday, we need to avoid leaving any wheels on these loose rocks that would leave us unstable (and unsafe to use the arm), and facing a direction where the rover’s turret does not block our view into the valley. We chose to drive about 10m total, in order to get the rover oriented at a good heading and parked in a good spot. We expect a similarly beautiful view from our post-drive imaging.
The last sol of the plan, has an extensive suite of atmospheric observations. Very early in the morning, we are taking a ChemCam sky observation, Navcam zenith movie, suprahorizon movie, and a line-of-site looking northward, and Mastcam crater rim extinction and solar tau.