Earth planning date: Wednesday, July 19, 2023
Curiosity is, first and foremost, a robotic geologist. As an atmospheric scientist who is a member of the environmental science team, this often means that I'm just along for the ride, guided by the needs of the geology team. Besides the fact that geology is our primary mission, observations requested by GEO are often more temporally-constrained than those requested by ENV. This is because if they want to take a close-up look at something, they will usually have only a sol or two to do so before we drive away, never to come back (with a few rare exceptions like our drive back to the marker band over 150 sols ago in our quest to get a drill sample). The atmosphere is always all around us, so it's typically less of a problem for ENV if we have to shuffle observations a few sols earlier or later to accommodate GEO's requests.
All of this means that dividing our available science time between GEO and ENV is often a careful balancing act. Typically, ENV reserves most of our observations for post-drive "untargeted" science blocks. Because they take place after a drive, we won't know exactly where the rover will be, so we can't plan any "contact science" activities involving the arm. Consequently, untargeted blocks are dedicated to remote sensing, where ENV excels. The pre-drive "targeted" blocks can then be saved for all of GEO's fun with the arm and imaging of more nearby targets.
Planning today was no exception to the balancing act. On Wednesdays, we normally plan two sols, often with targeted science on the first sol, a drive, and then untargeted science on the second sol. However, today we only planned one sol because Thursday is a "soliday," a day off for the rover to allow Earth and Mars time to resynchronize. This means that we only had a single targeted science block for GEO and ENV to fit all of our observations into. Complicating matters even further, we're still letting our batteries recover from some power-hungry observations last weekend, so the total time we had available was less flexible than usual.
Early in planning, it looked likely that ENV would have to push our Mastcam sky survey to study the properties of atmospheric aerosols into the weekend to save some power, but then we received word that the rover had parked itself in a manner where it wasn't safe to unstow the arm. As a result, GEO had to remove their contact science activities, giving ENV just enough time for the sky survey. A loss for one team will often be a gain for the other!
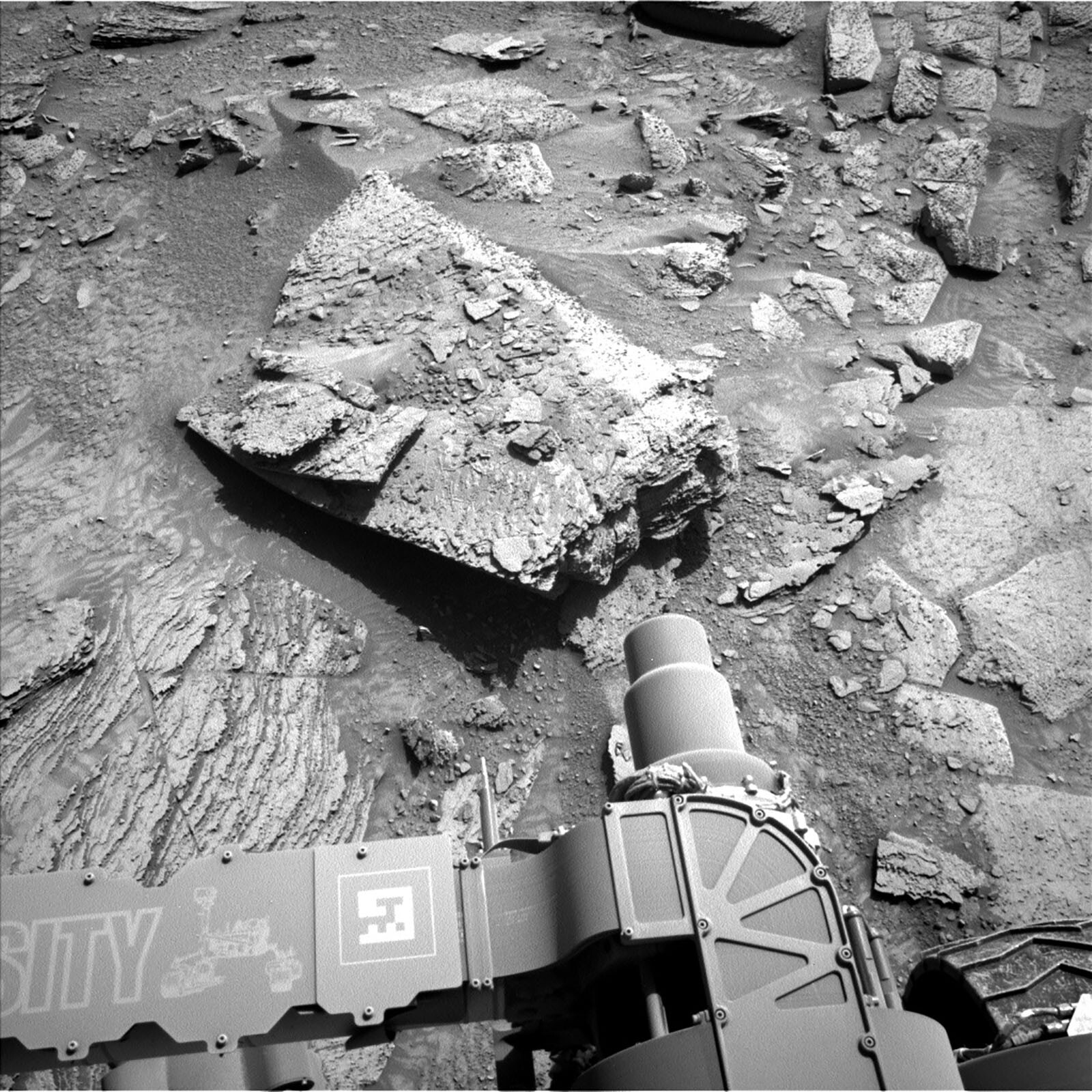
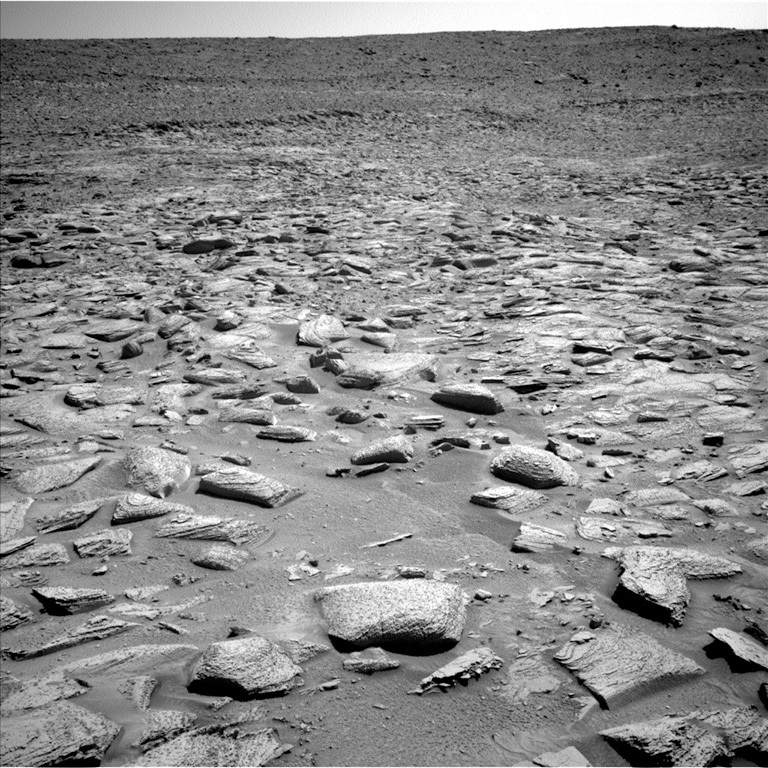
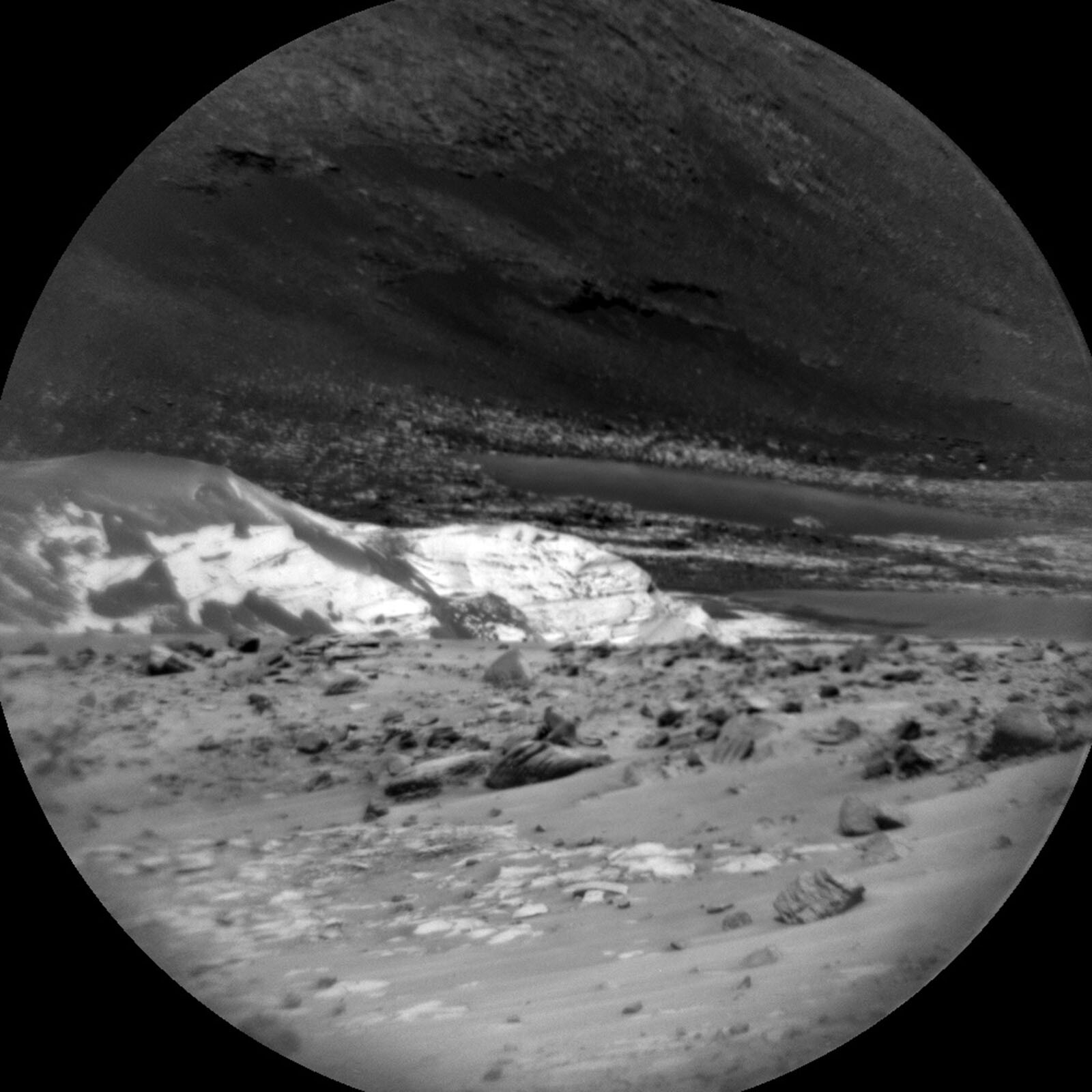
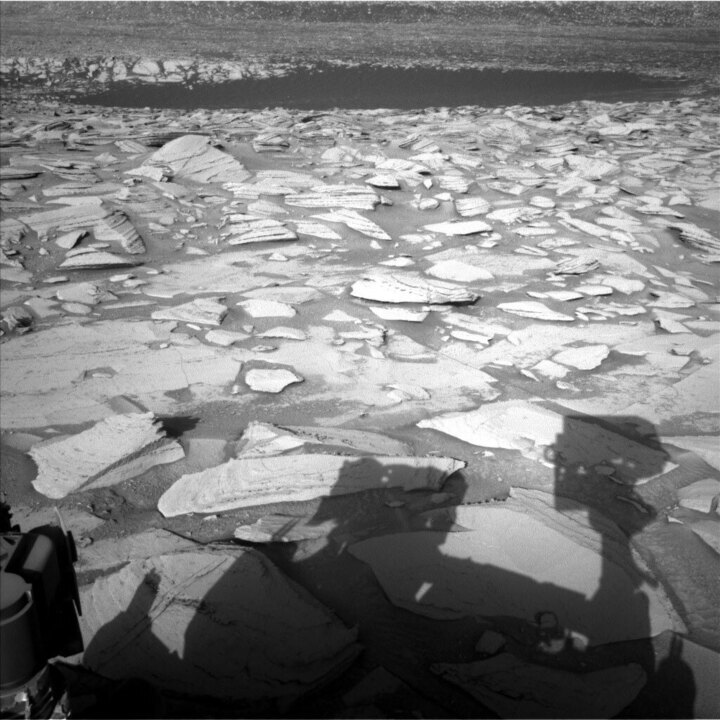
Despite all the challenges, we're still getting good science done in this plan. Our 29 metre drive in Monday's plan brought us to the edge of the crater cluster as expected, so GEO will be spending much of their time today taking Mastcam mosaics of the area to kick off this mini-campaign. For today, this includes mosaics of two craters in the "Jau" cluster, as well as documentation of ripples and lamina at "Jiparana" and a bedrock feature at "Cruzeiro." ChemCam LIBS and Mastcam will also turn their sights to "Akani-Pata," and ChemCam RMI will continue its survey of the upper Gediz Vallis ridge. Note the change in name etymologies, as our drive took us out of the Kalavryta quad that we entered not even 30 short sols ago and back into Roraima.
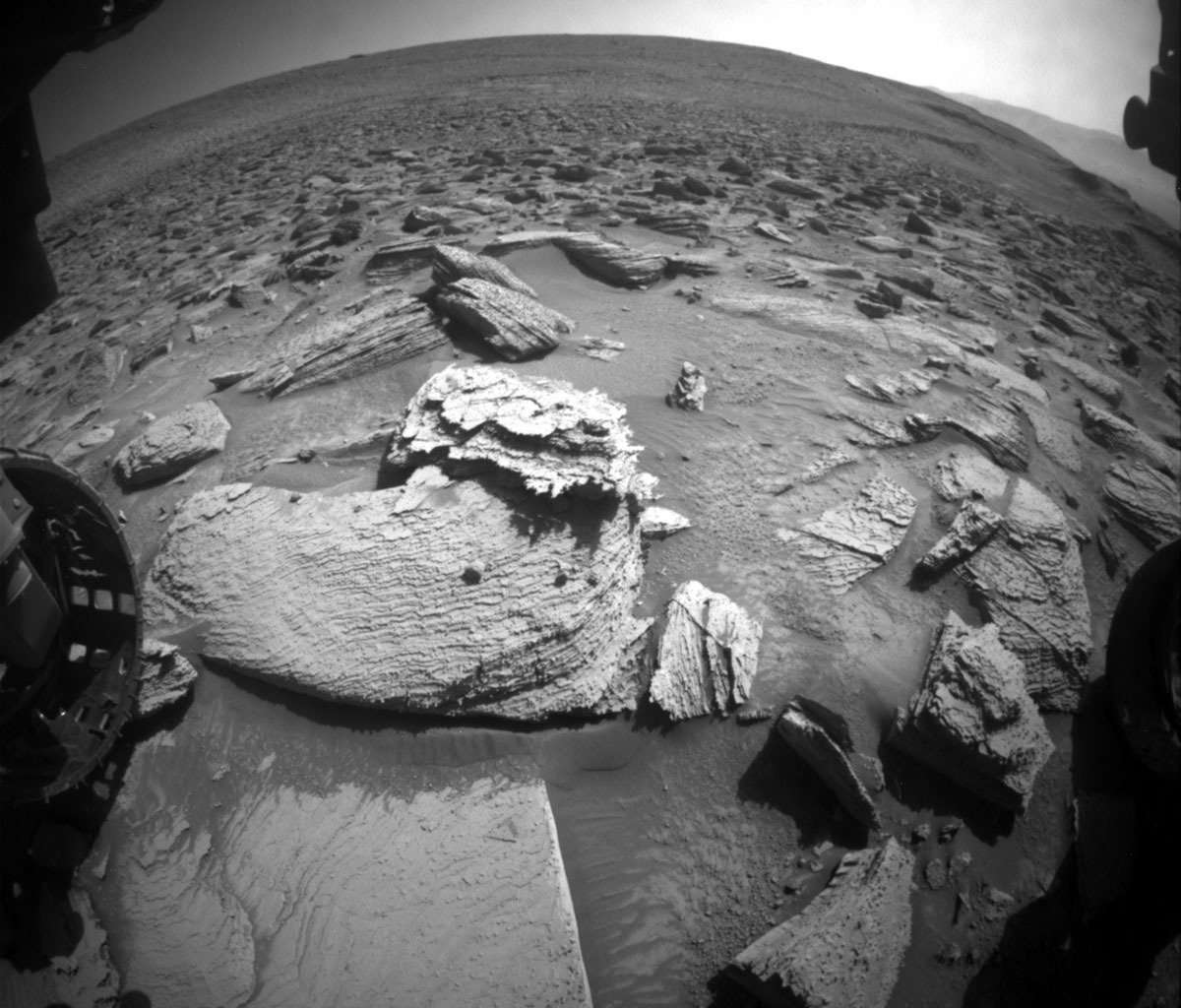
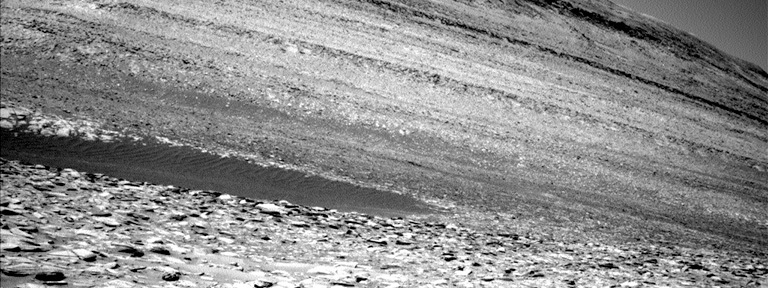
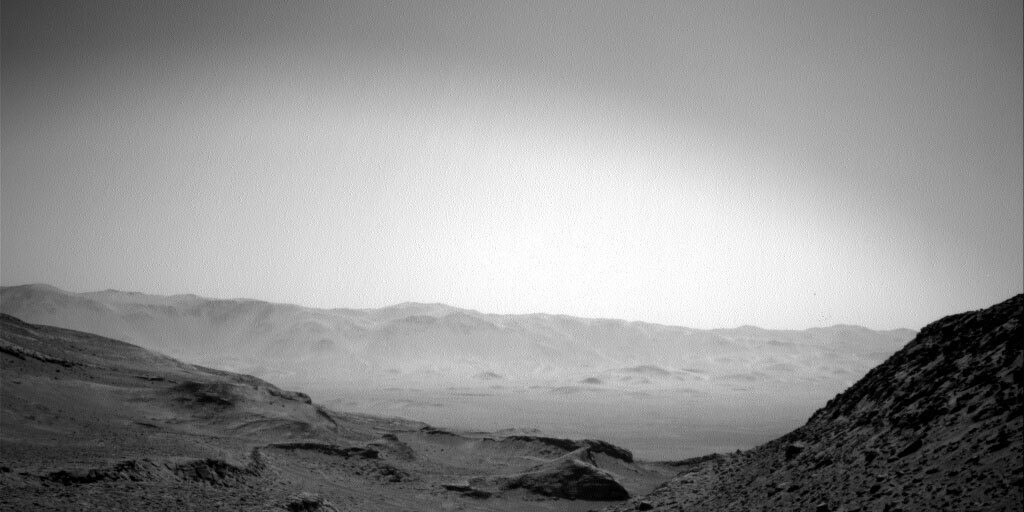
On the ENV side, in addition to the aforementioned Mastcam sky survey, we also planned a Mastcam solar tau observation to measure the amount of dust in the atmosphere as well as a Navcam dust devil movie looking out over a dark sand patch that we are parked near. As always, the plan is rounded out by a full set of REMS, RAD, and DAN observations to measure the weather and radiation environment, and to look for water-bearing minerals in the subsurface.