June 29, 2023
Sols 3873-3875: Up! Up! And Finally... Over!

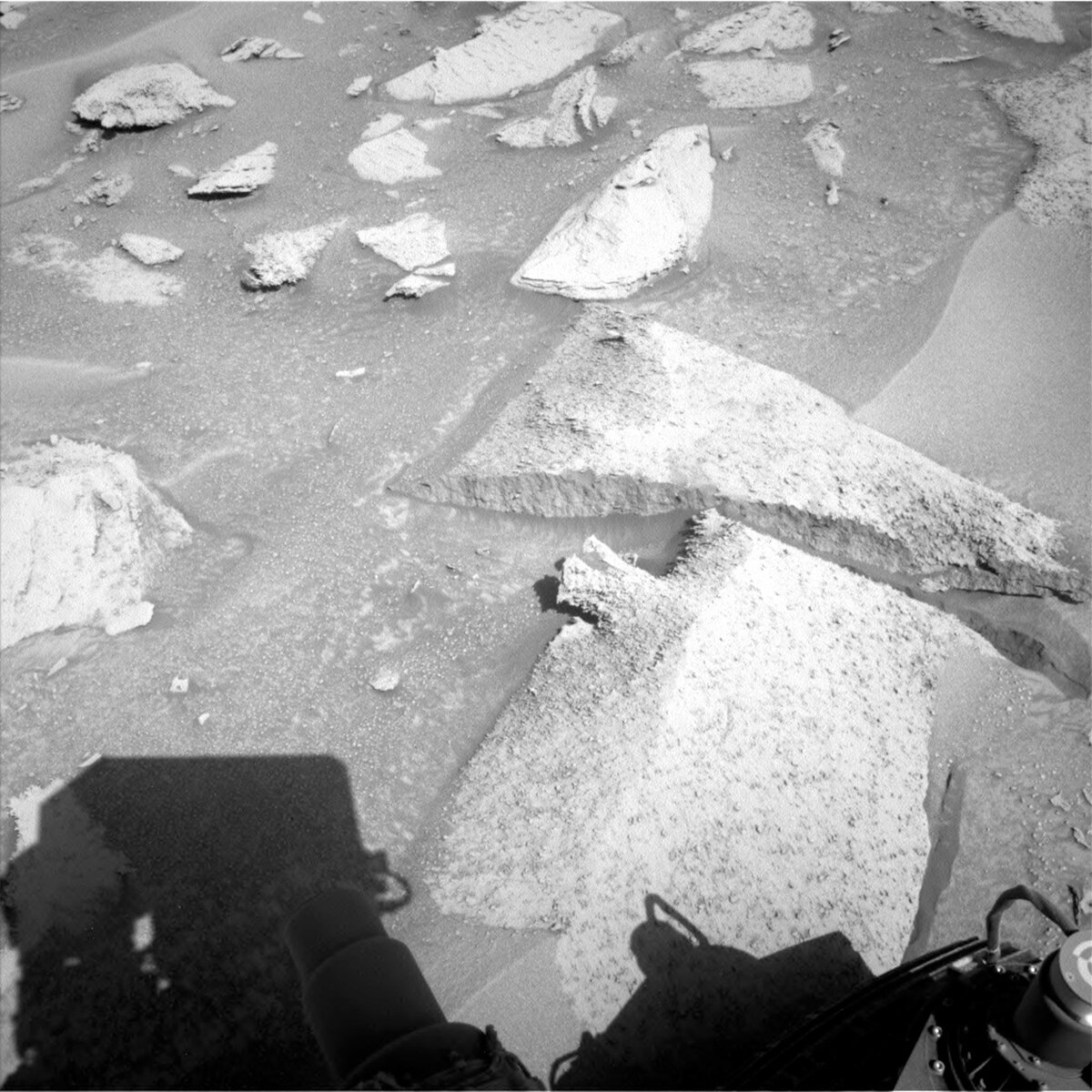
Right navigation camera, looking back down at the canyon. Credits: NASA/JPL-Caltech. Download image ›
Earth planning date: Wednesday, June 28, 2023
We made it! We are peeking up over the edge of the ridge that we have been trying to climb for a few weeks now. The view ahead is spectacular but it's worth pausing for a minute to look back down into the canyon. You can faintly see rover tracks in the centre of the image, left behind as we slowly made our way up the hill. Lots of slipping and sliding, and drives ending too soon or terminating on precarious footings, but we finally made it!
Today we planned a “Touch and Go” plan. Before we push out onto the ridge, we will characterise the local bedrock at “Madero” with APXS and MAHLI on some brushed bedrock. This workspace has mineral veins running perpendicular to the rock layers and fragments of a dark layer that is parallel to the other layers. MAHLI will image a vertical vein at “Vesini” to look at its relationship to the host bedrock and some of the dark layer around the vein, whilst ChemCam LIBS will analyze a vein fragment at “Mega Spilaio.” Mastcam will acquire a multispectral image of the same target.
Mastcam will also take four stereo mosaics in this plan. The largest mosaic (28 images) looks at the nearby crater cluster, as well as further ahead to “Gediz Vallis ridge” and the “Texoli” butte. Two smaller mosaics look at laminations and erosionally resistant features in bedrock in this area and an area of more active sand. The smallest mosaic (3 images) uses colour Mastcam imagery to support a black and white ChemCam RMI observation, which focuses on erosionally resistant features in the direction of today’s drive.
Our drive on the afternoon of the first sol is relatively short, about 15 metres further out onto the ridge, where we hope to catch up on an important housekeeping chore in the upcoming 4th of July long weekend plan. Full MAHLI Wheel Imaging (FMWI) uses a combination of Mastcam and MAHLI to image our wheels and monitor them for wear and tear, and was last done just before Thanksgiving. This activity needs some flat ground to be executed, so it had to be delayed while we were playing slip-and-slide on the hill and we are hoping to get it done as soon as possible now in order to keep to our routine cadence (every 1000 metres).
ENV planned some basic tau measurements for this plan, where Mastcam will help to measure dust in the atmosphere. On the second sol of the plan, ECAM will look for dust devils and survey the clouds overhead in Gale. ENV rounds out the plan with DAN and REMS activity, for a full suite of environmental activities.