December 16, 2022
Sols 3684-3686: The Calm After the Rock-Toddler-Tantrums
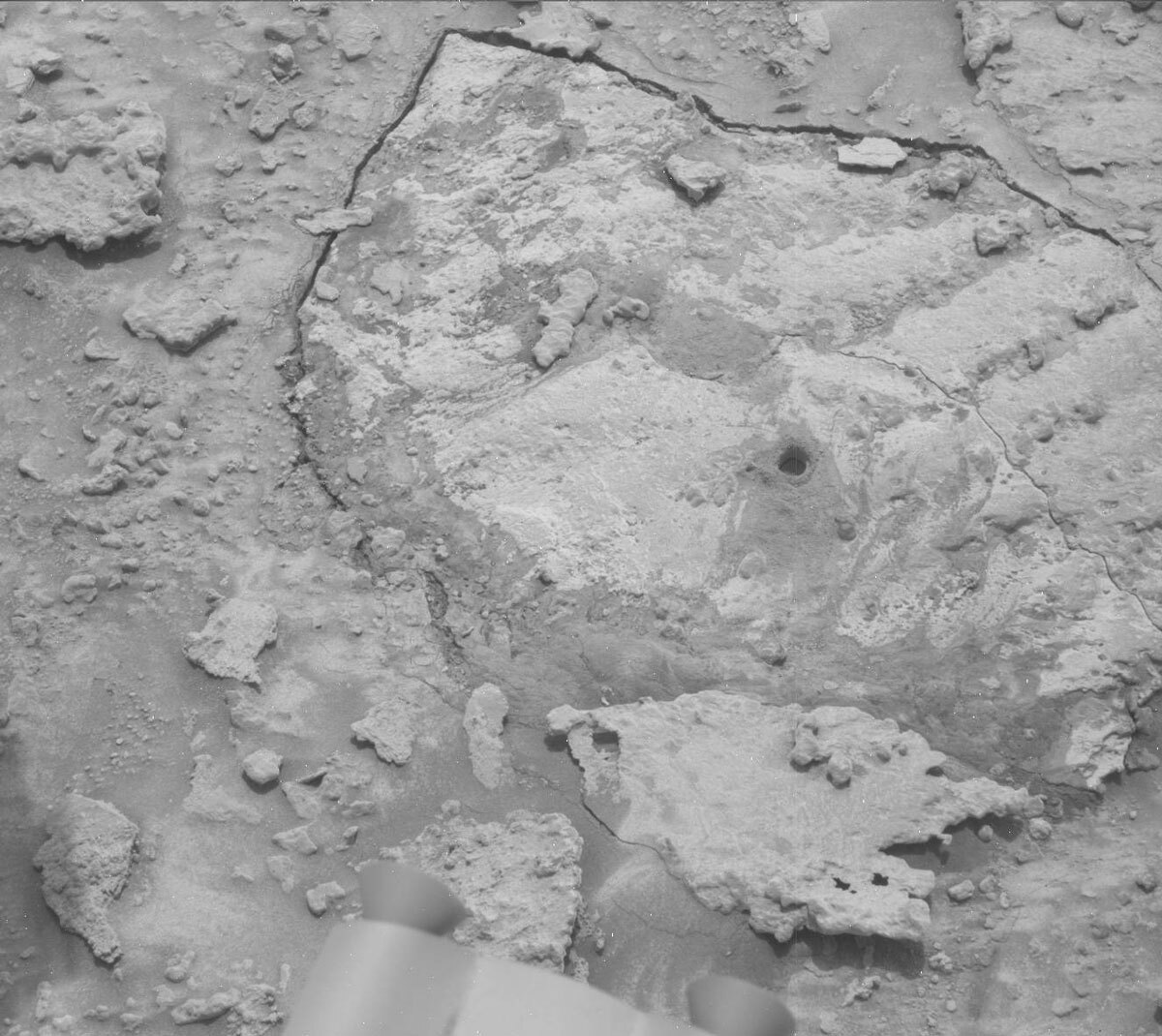
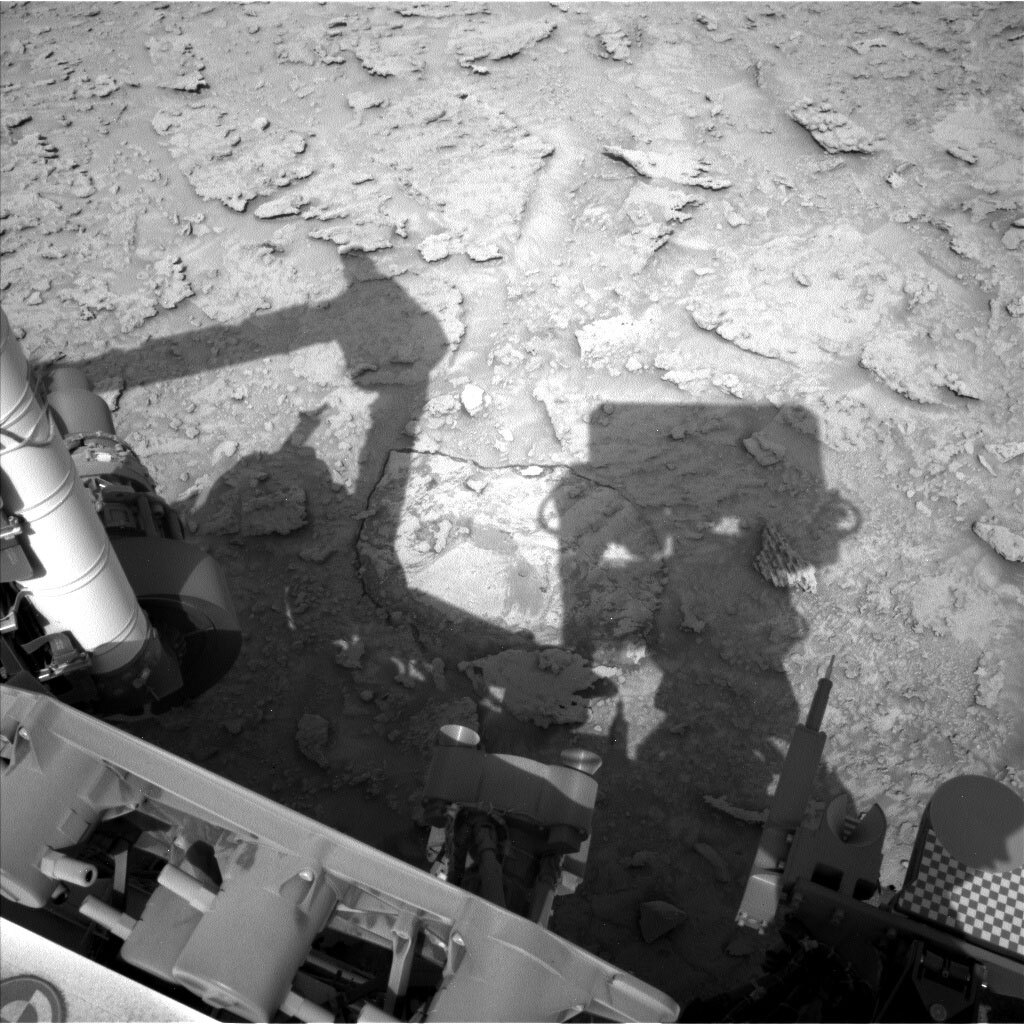
This image shows the “Amapari” drill hole, unfortunately not quite as deep as the team on Earth hoped. The image was taken by Mast Camera (Mastcam) onboard NASA's Mars rover Curiosity on Sol 3682. Credits: NASA/JPL-Caltech/MSSS. Download image ›
Sometimes, I think Mars rocks are just a bunch of toddlers whom we have told to tidy their play room. And the more we want something, the more resistance we get. The latest episode of ‘This-rock-is-too-hard-to-drill, says the rock,’ reminded me of our drill attempt at Vera Rubin Ridge. In June 2018, we had drilled Duluth and also weathered the dust storm. We then tried to drill a specific type of rock with a hematite mineral signature observed from orbit. Looking back at July 2018, we can re-live that story. First was target ‘Voyageurs’ and my colleague Lauren Edgar entitling her blog ‘Hard as Rock’ after the drill only made a dent into the surface, and only got a little further into the rock at target ‘Ailsa Craig’ (see ‘It’s a Hard Rock Life’ by Ryan Anderson). Well, reading the past few blogs from December 2022 made me remember all that. Deja Vu, but let’s hope we get it this time, as the rocks we want to drill would provide an important piece of information about the changes in the landscape we observe on the images, and also the chemistry that we observe with ChemCam and APXS.
Today, though, was a calm and regular planning day, which had us plan three sols, knowing what we wanted to do from the get go and no surprises to scramble around. That’s welcome at a time where many of us are scrambling in other parts of our lives to get the holiday shopping done, and such… you know what I am talking about here on Earth at that time of the year, right? But that doesn’t mean we won’t keep the rover busy with exciting science.
APXS and MAHLI will investigate target “Jundia,” a target that looks nodular, target “Urutanim,” which was already investigated by ChemCam in the previous plan, and finish up our drill activities by looking at the Amapari drill tailings.
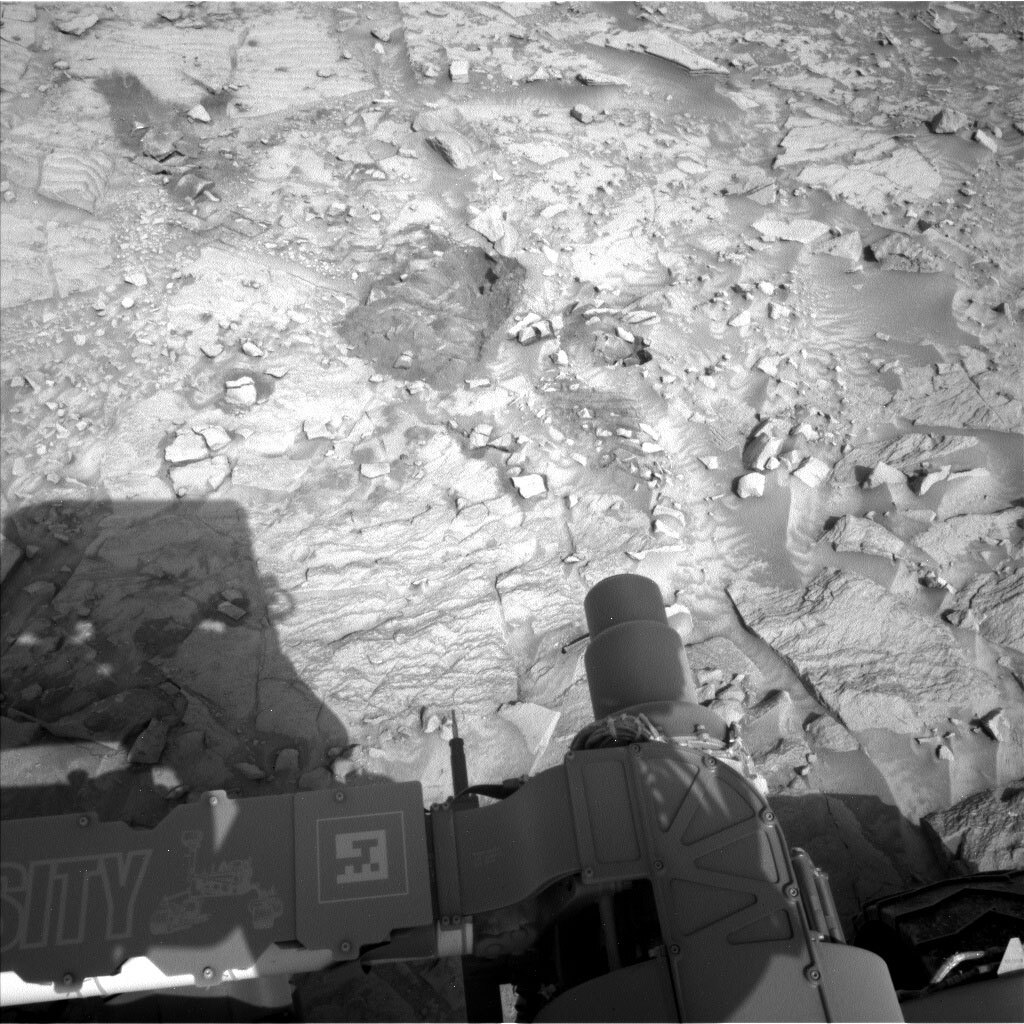
Mastcam will continue its feast to image the beautiful and hugely interesting scenery around us. It will look at the workspace and extend the coverage there, but also document all the ChemCam activities in this three sol plan. More into the distance it will look at the target “Sao Jorge” and then complete our activities around this rock-toddler-tantrum drill site with a 360° mosaic.
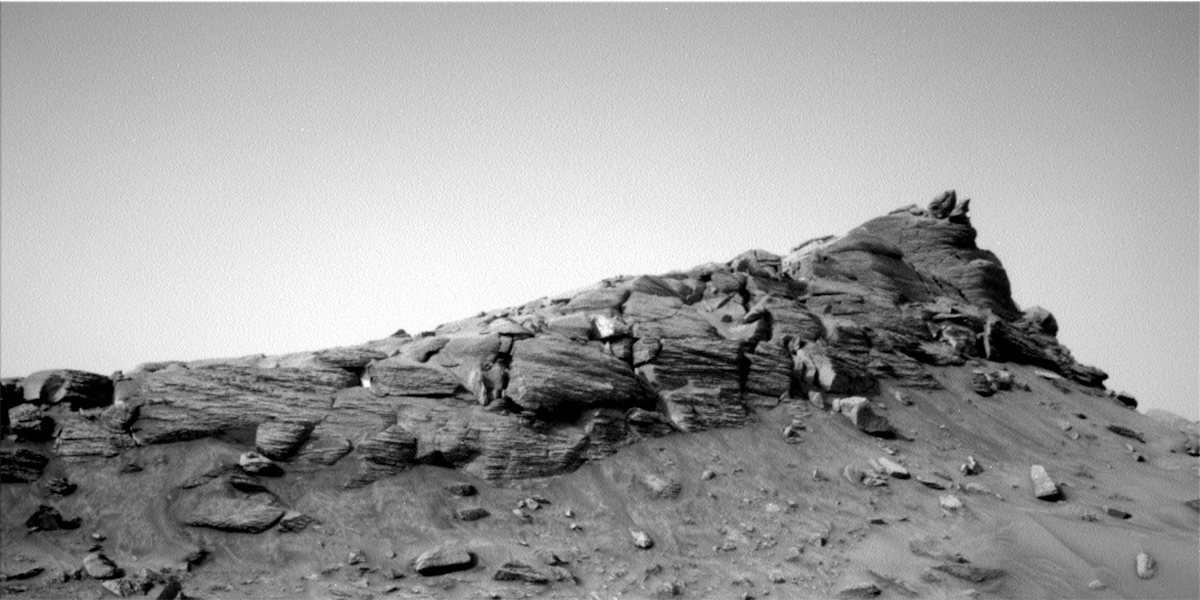
ChemCam has a busy time, too, with three LIBS targets in the plan. It will look at both Amapari drill holes, and in addition at the nearby target “Aricama.” ChemCam also used its imaging capability to get close looks at two interesting areas, one is the continuation of the rock type we tried to drill, and at a sedimentological feature in the distance that could be what is known as inverted channel – a feature where the surrounding of an ancient, fossilized stream bed are harder than the rock formed from the materials that surrounded that stream bed. Therefore, we still see the streambed, as a positive relief feature, and the former surroundings have weathered away. We will see what the close up images reveal there! Add MARDI imaging, ENV activities and a drive, and we have a very busy sol on Mars!