November 22, 2022
Sols 3665-3666: Thanksgiving Plan Part Two!

This image was taken by Mast Camera (Mastcam) onboard NASA's Mars rover Curiosity on Sol 3658. Credits: NASA/JPL-Caltech/MSSS. Download image ›
Thanksgiving plan part two would of course include all the traditional pleasures we know – if you are in the US that is, if you are, like me, in Europe then we’ll have to wait a few more weeks until Christmas time to have our traditional family gathering, and others again will have it at an entirely different time of the year. Curiosity, though, will celebrate all those earthly festivities by getting more science and finding out yet more about Mars and Gale crater’s rock record!
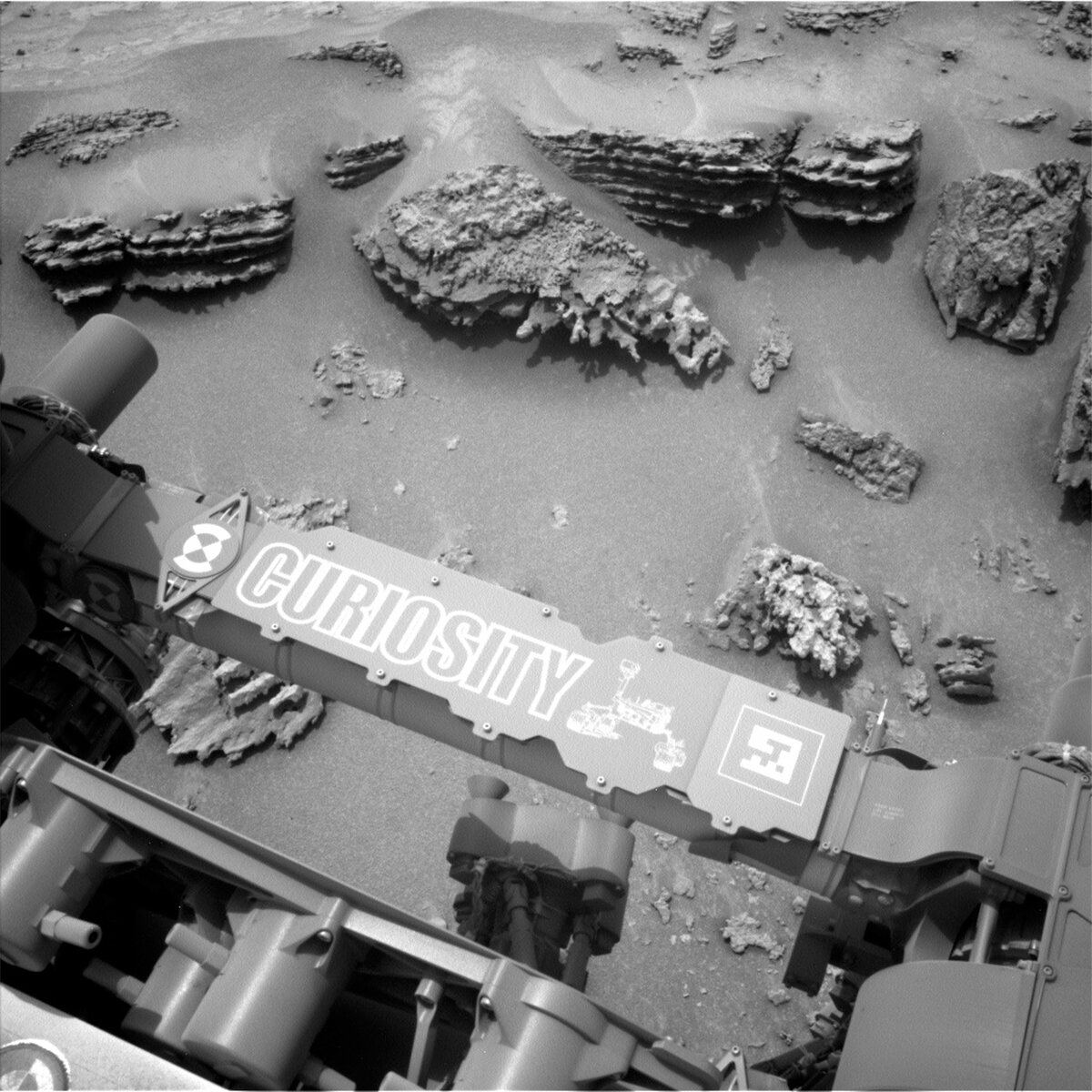
The image above shows one of our wheels and the JPL ‘morse code’ message. I wonder just how many of those we have made on Mars so far. Ten years and over 29 kilometers (over 18 miles) later one could theoretically calculate that knowing the wheels are 50 cm in diameter and thus the circumference is about 1.57 metres…. I think I leave the rest to you and just say: What a journey, and no matter if we celebrate Thanksgiving by calculating the number of morse code imprints we have left on Mars (and that Mars has probably dutifully erased by blowing dust over them!) or not, seeing our hardware on Mars always is a pleasure to be thankful for!
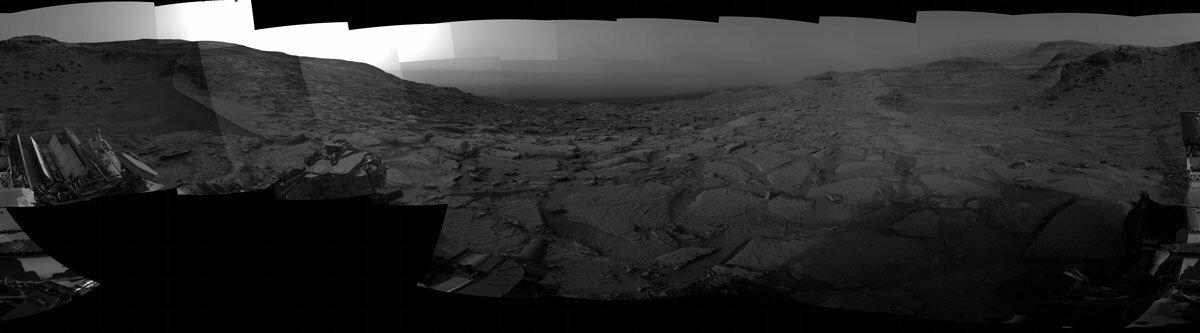
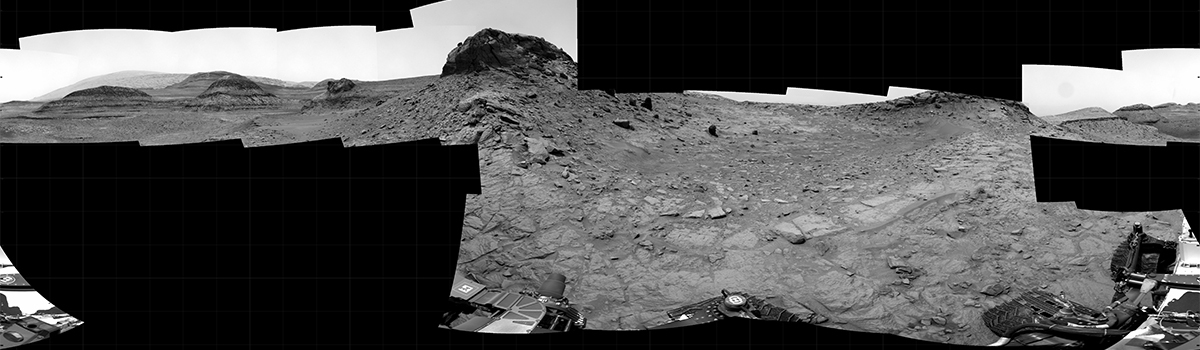
In this part two of our Thanksgiving plan, Curiosity is getting a lot of investigations done at out current location before we turn around and move on to continue our journey up the interesting and informative landscape that is the flank of Mt Sharp. If you want to remember what that area looks like from a distance, a beautiful image was recently posted, including an indication of the rover size as seen from a position back in 2015! We’ve come a long way, see for yourself here.
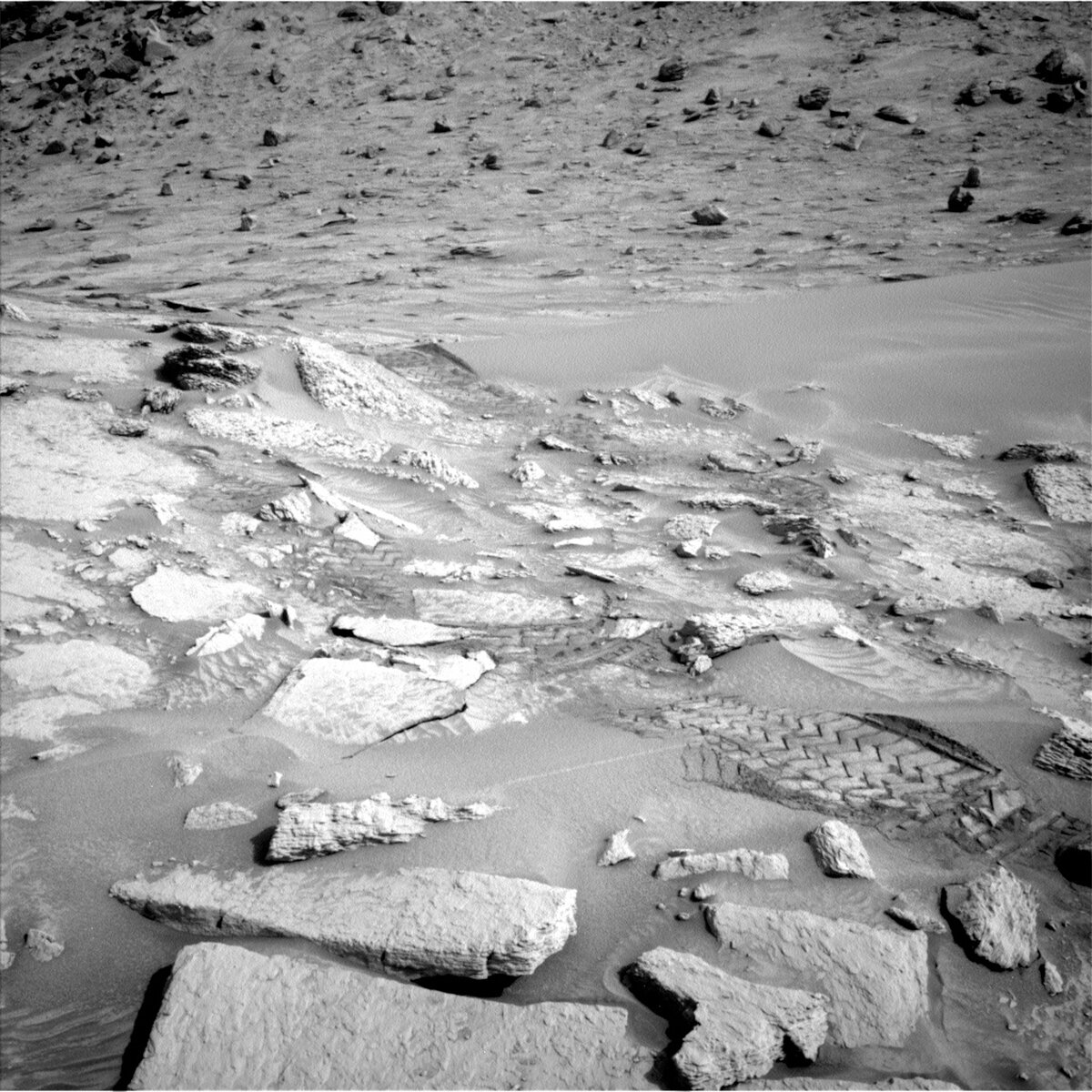
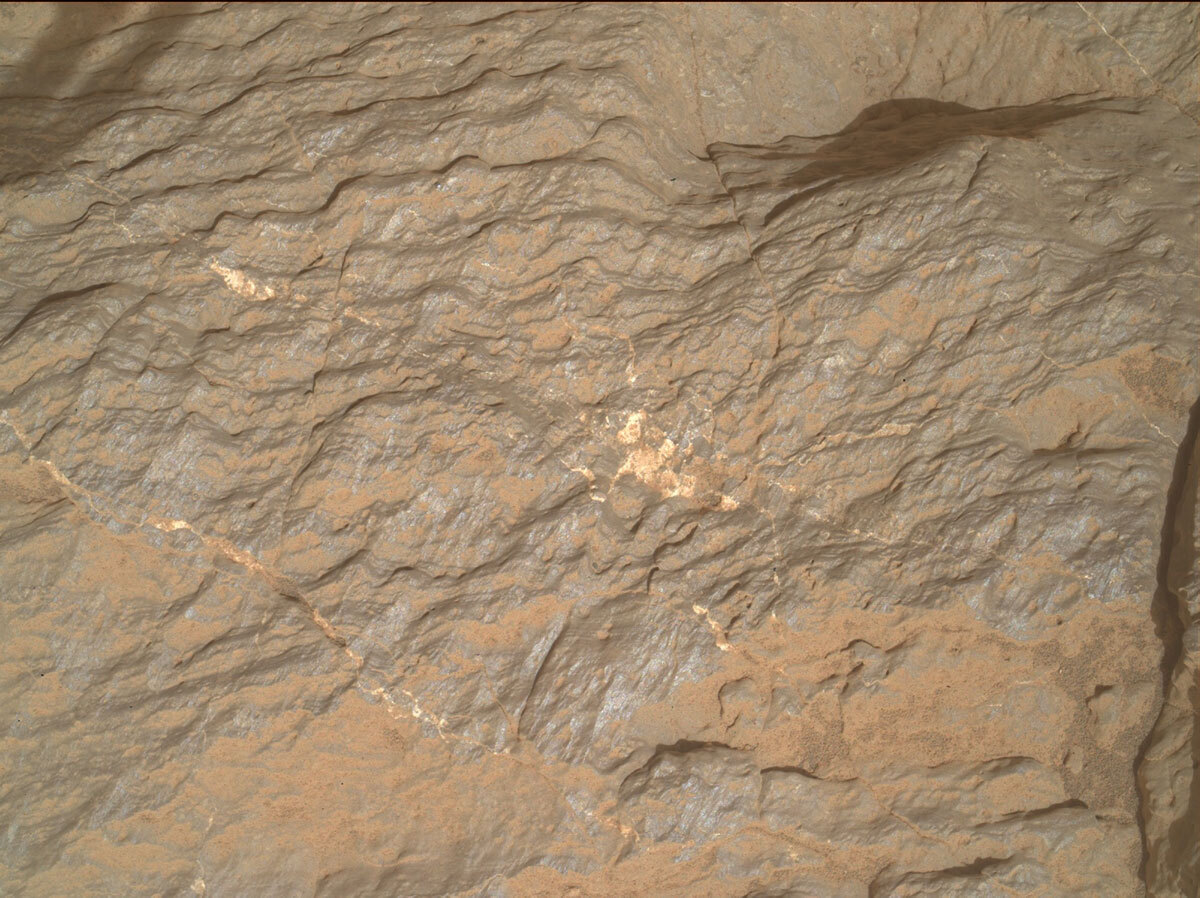
Enough happy thoughts, let me talk about the plan in front of us, well, on the rover: APXS and MAHLI will investigate target “Los Tranques,” which is a bedrock target, after it’s been brushed. That target will then also be investigated by Mastcam using the multispectral mode. Another multispectral observation is on target “Poraque.” ChemCam will look at target “Murabia,” which caught the team’s attention for its colour and knobbly surface texture. Mastcam is documenting this target, too. Mastcam also has three spots to monitor for change detection – taking images that would allow the team back on Earth to allow to trace the movement of sand grains between different sols.
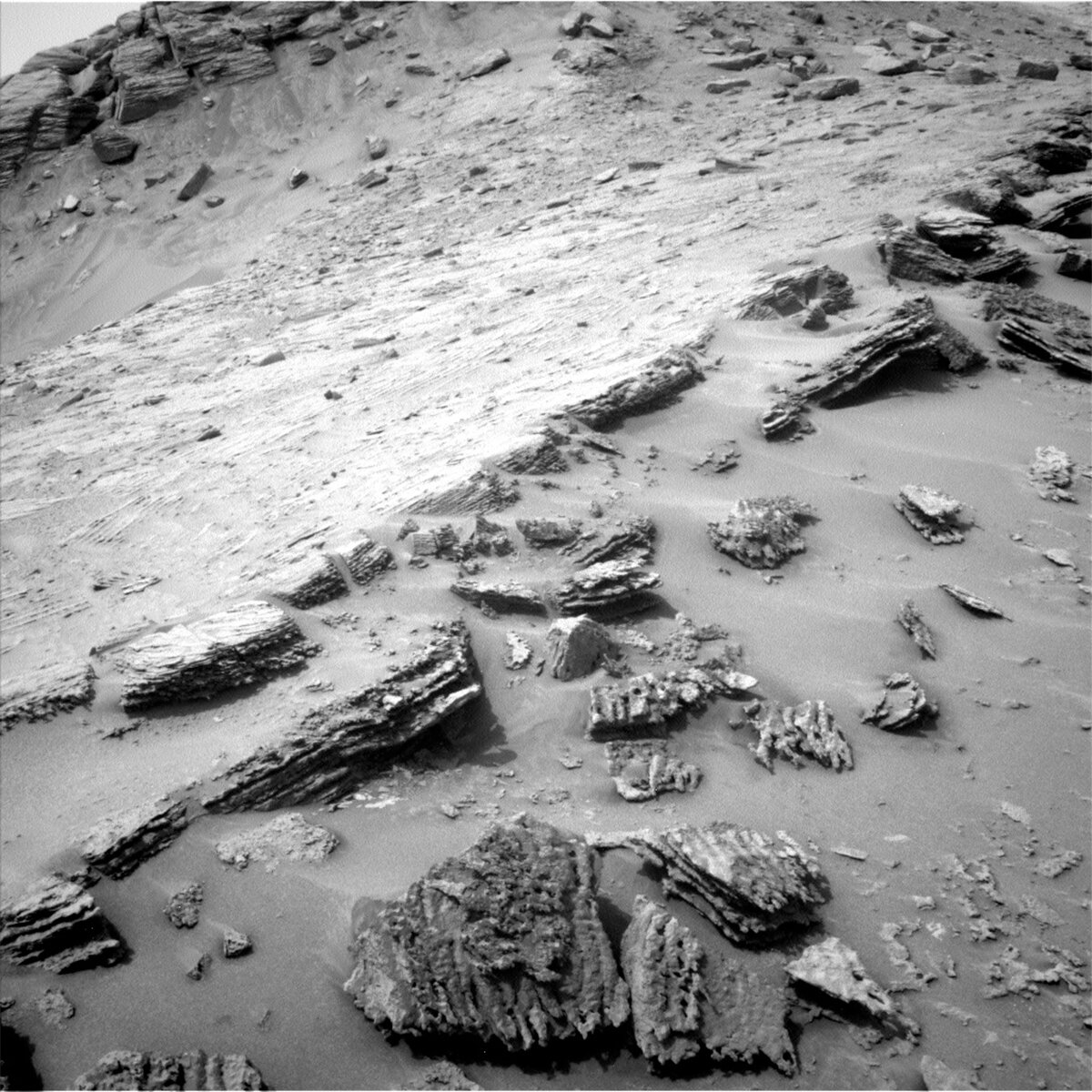
There is a lot of imaging going on, still, because this landscape is so fascinating and displays the layers upon layers of rock, to scientists known as stratigraphy, in excellent ways. Curiosity has already taken images of parts of an outcrop in the distance we called “Bela Vista,” which is extended in this plan to cover the feature in full. Mastcam is also documenting the structures of a block closer to the rover, which is called “Wonotobo.” ChemCam also uses its remote imager in distance mode to take close up images of another interesting stratigraphic feature. Last but not least, there is a drive, post drive imaging and a ChemCam AEGIS as well as a MARDI image after the drive.