September 16, 2022
Sols 3596-3598: The Sweet Spots
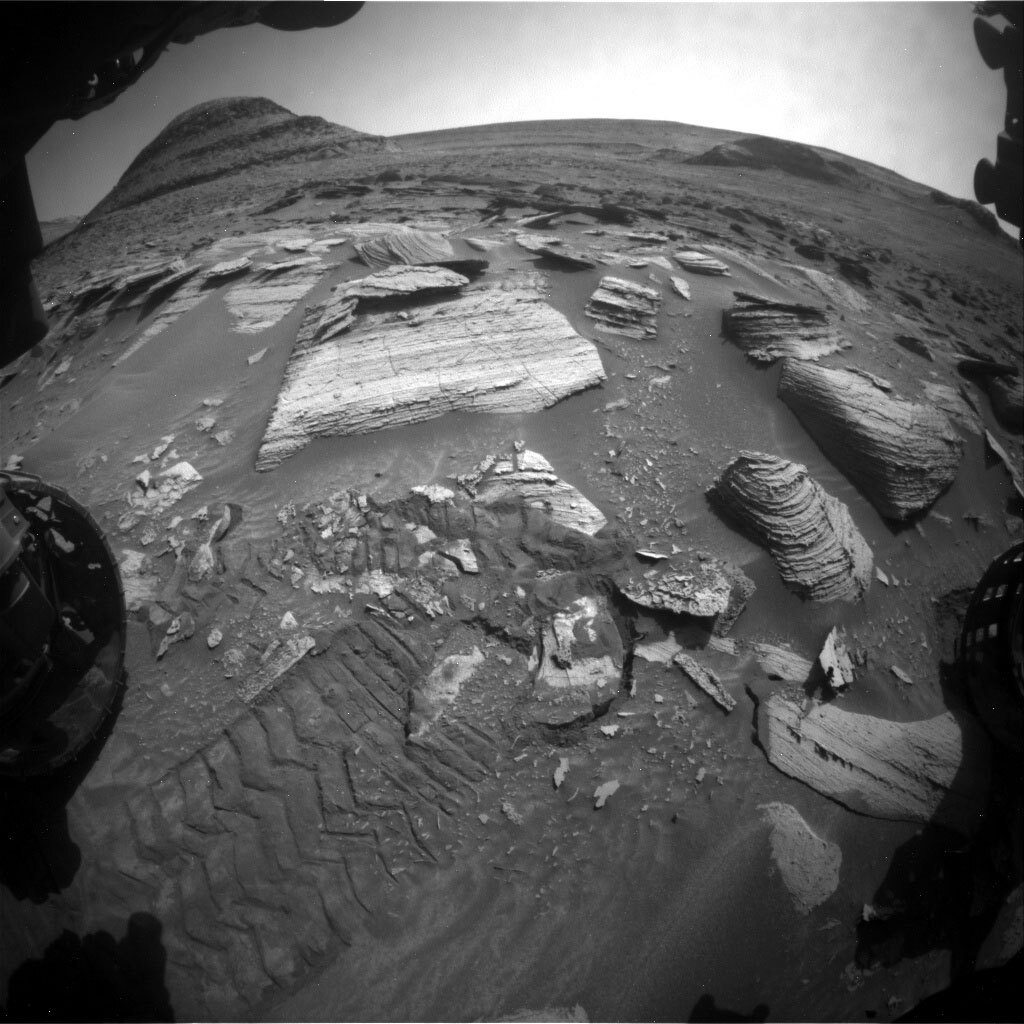
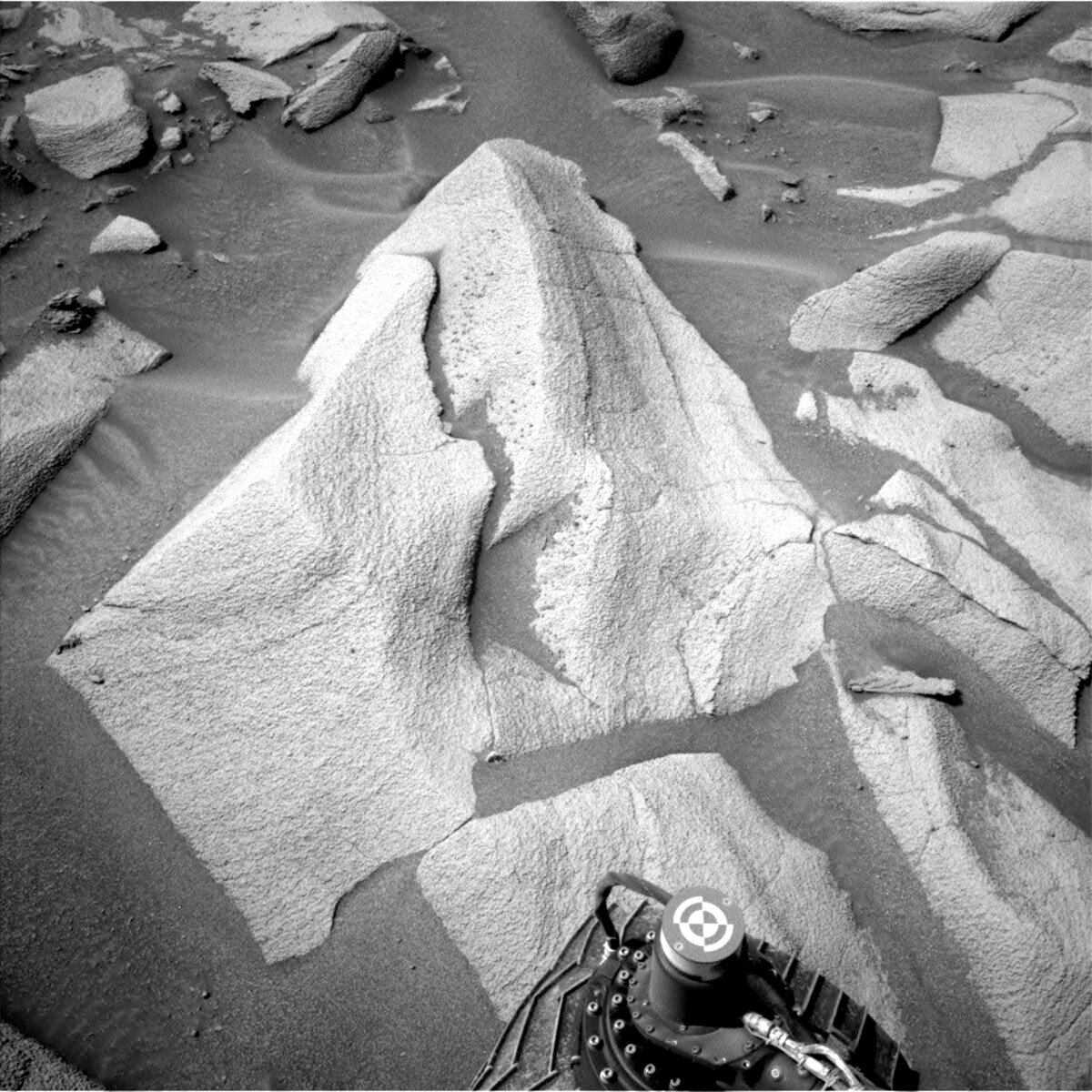
This image was taken by Front Hazard Avoidance Camera (Front Hazcam) onboard NASA's Mars rover Curiosity on Sol 3594. Credits: NASA/JPL-Caltech. Download image ›
As discussed in the previous blog, we’ve had some drive faults recently due to the tricky terrain we are on. After the drive on sol 3592 faulted, on sol 3594 I planned the drive as the mobility Rover Planner. I was so happy to log into my workstation this morning to see that the drive worked and put a really cool rock into the robotic arm’s workspace that the scientists had been aiming for!
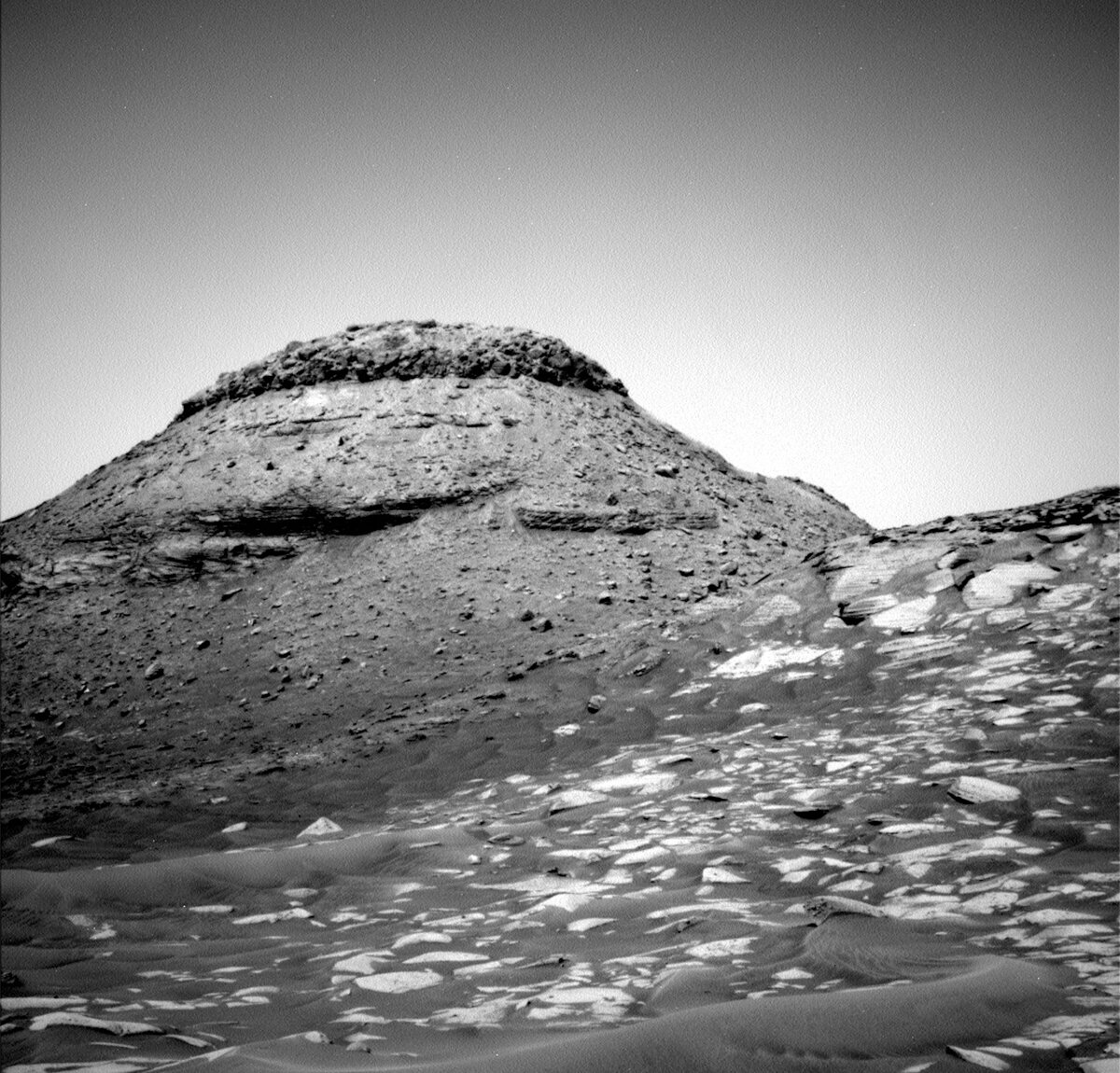
We start out sol 3596 with a remote sensing block full of ChemCam and Mastcam goodies. We start with ChemCam using its laser on “Marshall Falls” which will also be a later robotic arm target. ChemCam will also image Bolivar in the distance. After that, Mastcam will image Bolivar, Marshall Falls, Orinoco, “Pirai Pond” cobble, “Joao Gama” bedrock, and “Agua Blanca.”
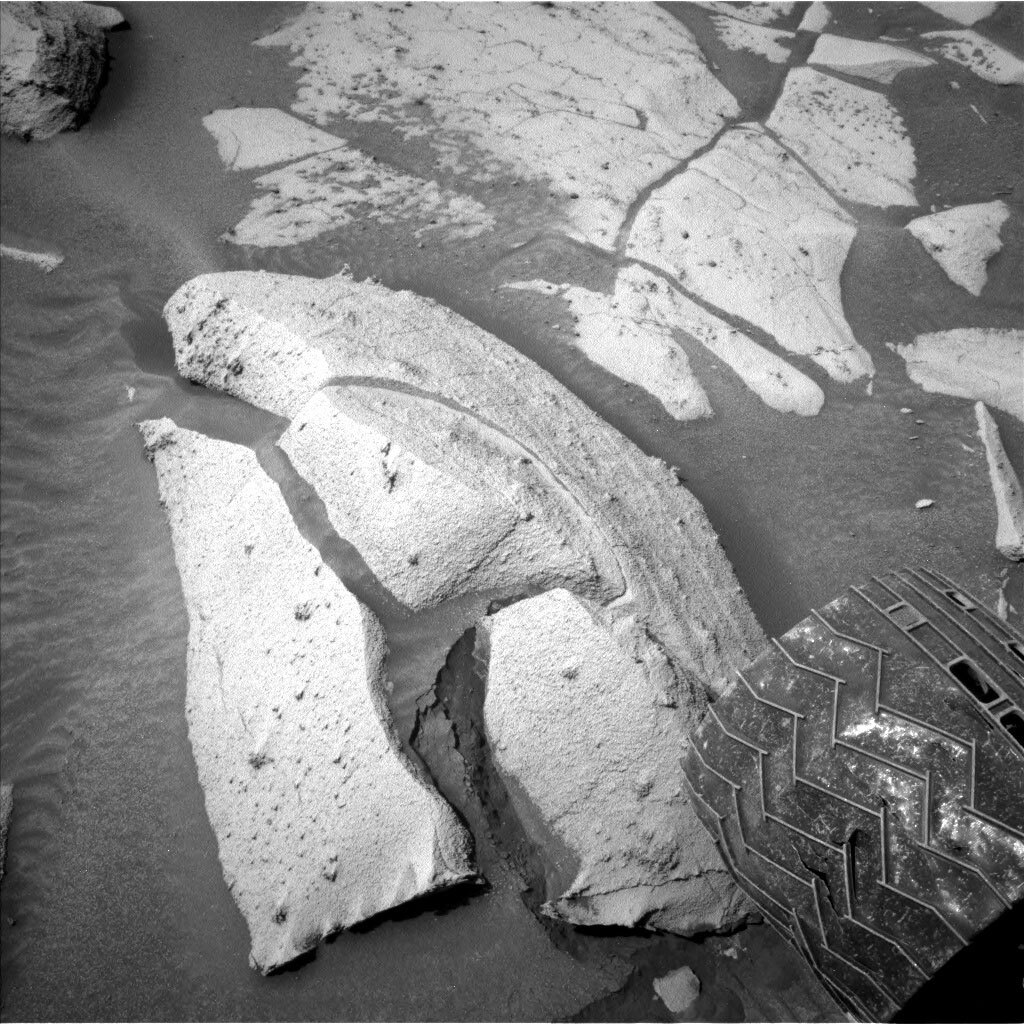
Next up is the first set of our robotic arm activities for the sol. Today I was the arm Rover Planner, although I had a trainee, Changrak, shadowing me and he was the one writing up the arm commands while I was double checking his work. It was his first shift for operating the robotic arm! He recently received the mobility Rover Planner certification so next up is working towards the robotic arm Rover Planner certification. He got a trial by fire as the science team asked for a lot of robotic arm activities today, including two brushes with our Dust Removal Tool! Usually, we’ll only do one brushing activity because of planning constraints like time or power available for rover activities, but the science team was incredibly excited about this rock and we have abundant time and power in this plan, so we were able to get in the two brushes, one on Marshall Falls and another one on “Corona Falls.” Corona Falls is a darker section of the rock and Marshall Falls is a lighter section of the rock, so the scientists want to investigate the differences between the two areas. We will also take extensive MAHLI imaging of both targets. This first group of arm activities ends by placing APXS onto Corona Falls for an evening integration. A bit later in the evening, we reposition the arm to place APXS onto Marshall Falls for another set of integrations. Later in the night we’ll stow the arm so we’ll be ready to drive on the next sol.
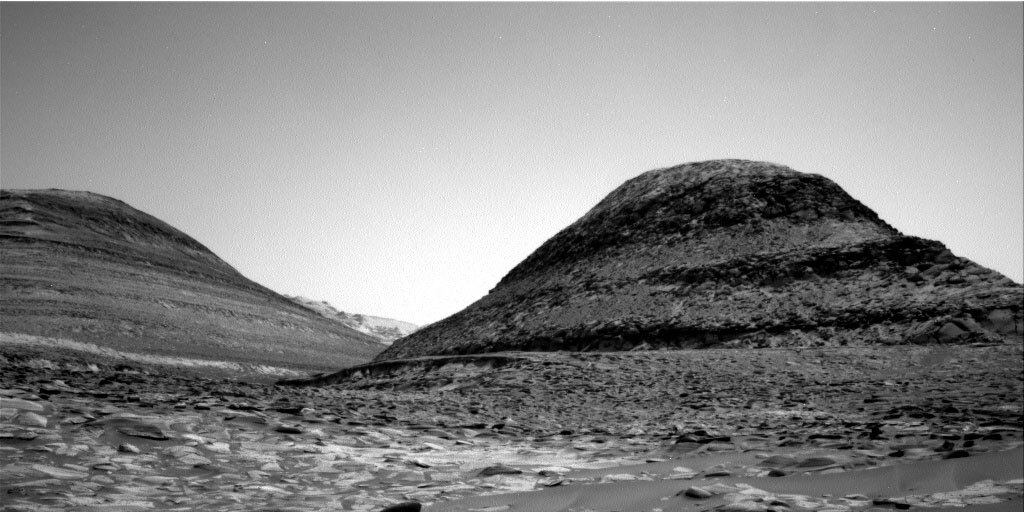
On sol 3597, we begin with some ChemCam and Mastcam observations. ChemCam starts by using the laser on Corona Falls, then images an inverted channel in the distance. Mastcam will then take multispectral imaging of Marshall Falls and Corona Falls. As you can see, we are using a lot of the rover’s instruments to study Corona Falls and Marshall Falls! Taking observations with multiple instruments help the scientists reveal more information, since each instrument can provide a different data set that when combined can reveal more information about the rocks. Mastcam will also image the rover deck to keep an eye on how dusty the rover is. Navcam will also look for any Martian dust devils and monitor dust within Gale Crater.
Once all of that is done, we’ll drive! We’ll be driving about 12 meters to another interesting rock the scientists hope to analyze in the next plan. During this drive we’ll also be taking a MARDI video to watch the terrain change below the rover. Today’s plan has what we call a small decisional pass, in that we will not get a lot of data down after the drive that will help guide the next arm or drive activities. The scientists and engineers work closely to prioritize the data to try and make sure the critical imaging will come down that will hopefully enable robotic arm activities and more driving in the next plan. Sometimes these passes can overperform and give us more data than we anticipated, so we’re crossing our fingers for this to happen and give us a better chance of having all the information we need.
Later in the afternoon of sol 3597, we’ll take a zenith movie to look for clouds in the sky. In the evening we’ll take a picture with MARDI to see the terrain again below the rover in different lighting and shadows from the end of the drive movie.
Sol 3598 contains a lot of Martian atmospheric observations with a Mastcam atmospheric dust opacity measurement, a ChemCam autonomous laser activity and some imaging of the sky, and Navcam imaging of the sky and a dust devil search. The entire plan also contains a lot of background REMS, RAD, and DAN observations to characterize the Martian environment.