May 16, 2022
Sols 3476-3477: A SAM Methane Experiment Between Drives
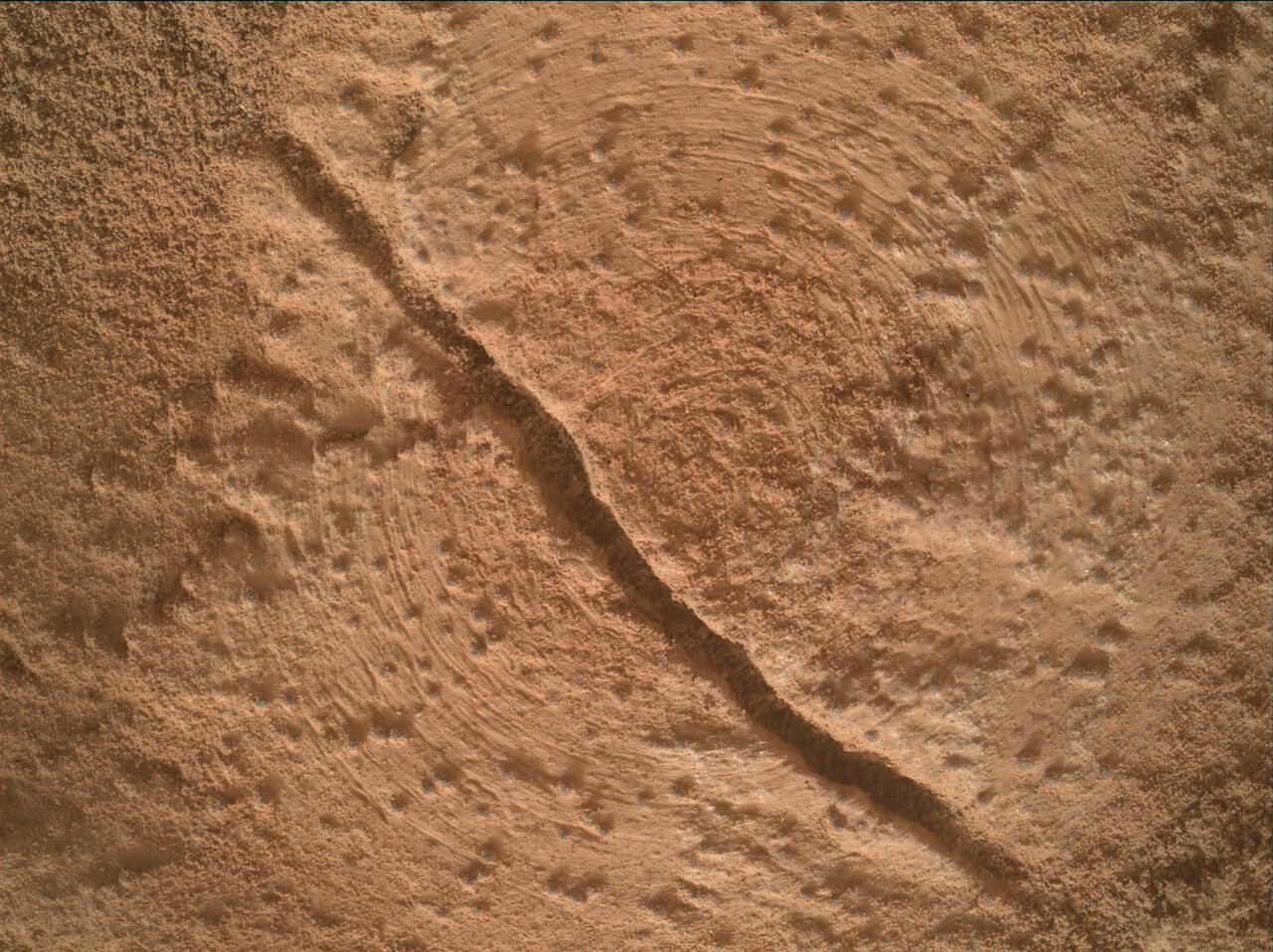
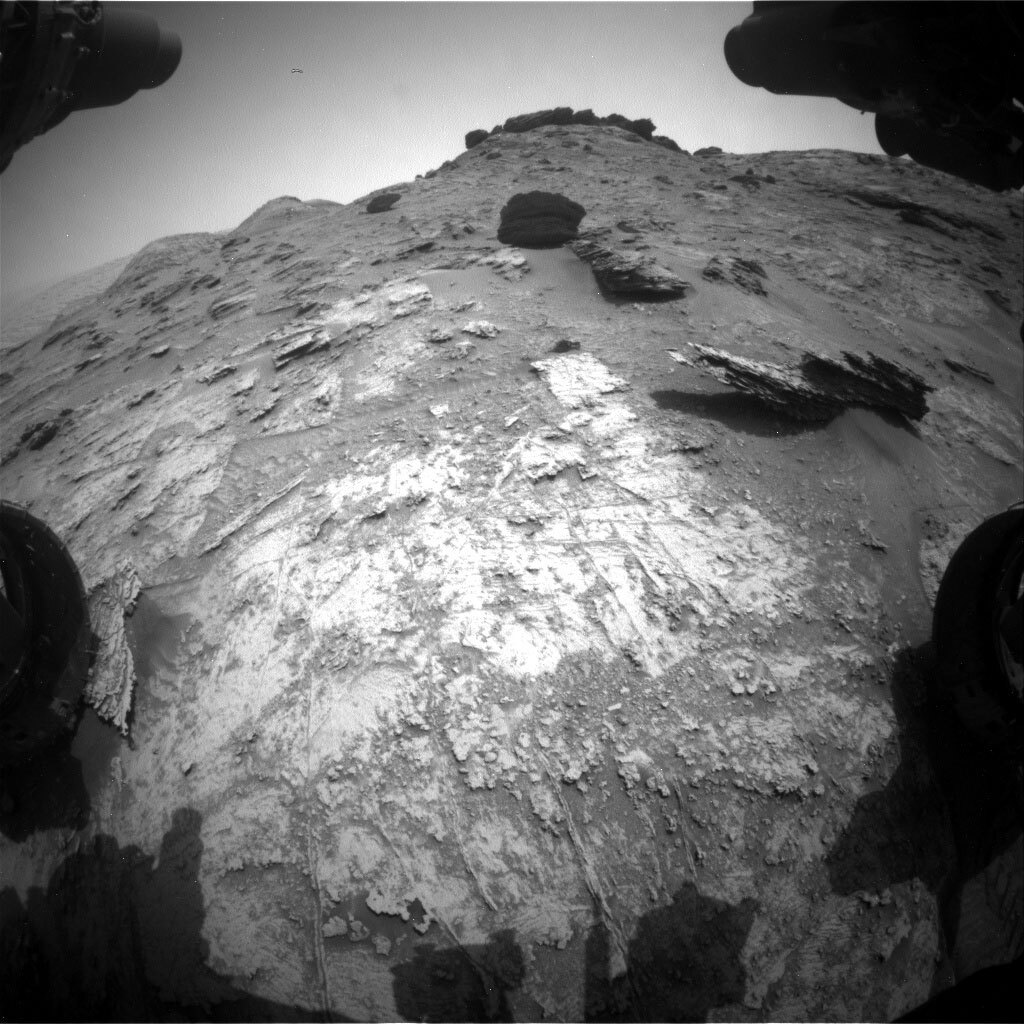
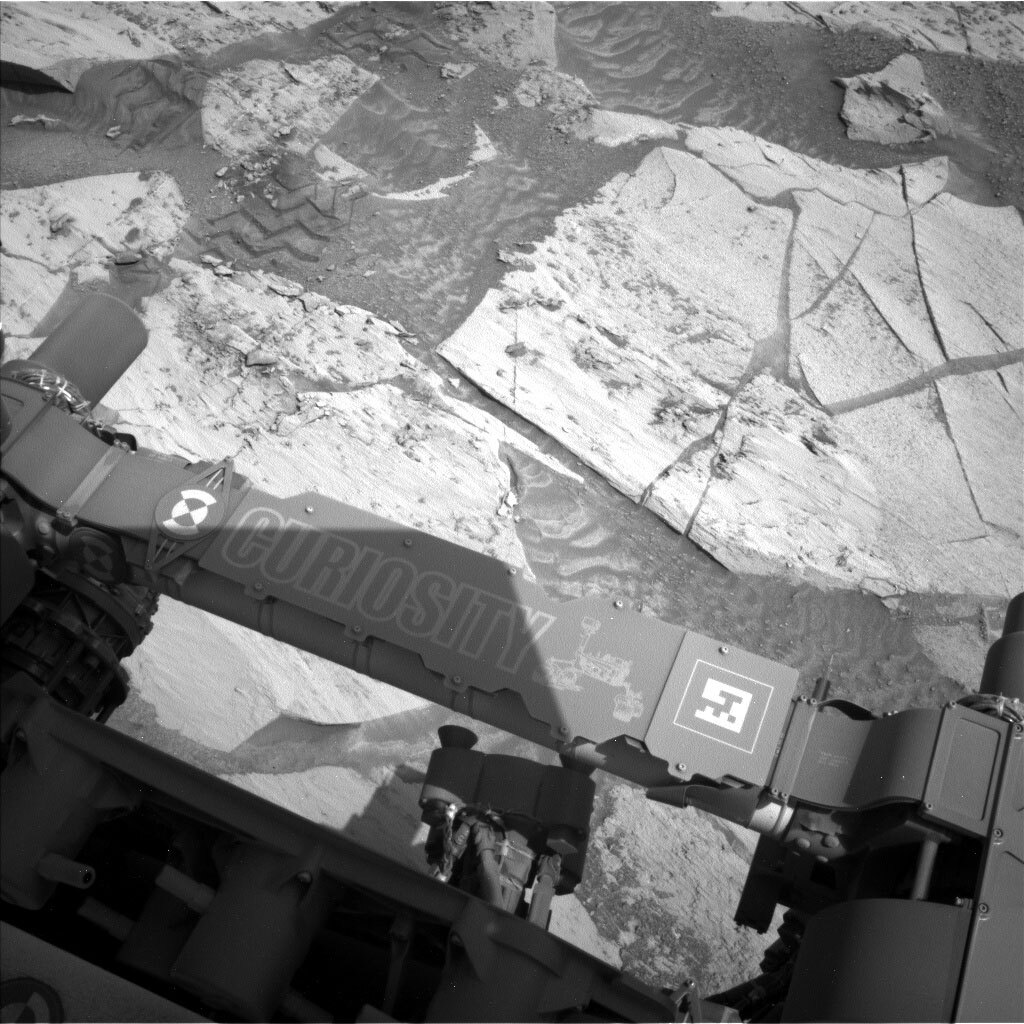
This image was taken by MAHLI onboard NASA's Mars rover Curiosity on Sol 3474. Credits: NASA/JPL-Caltech/MSSS. Download image ›
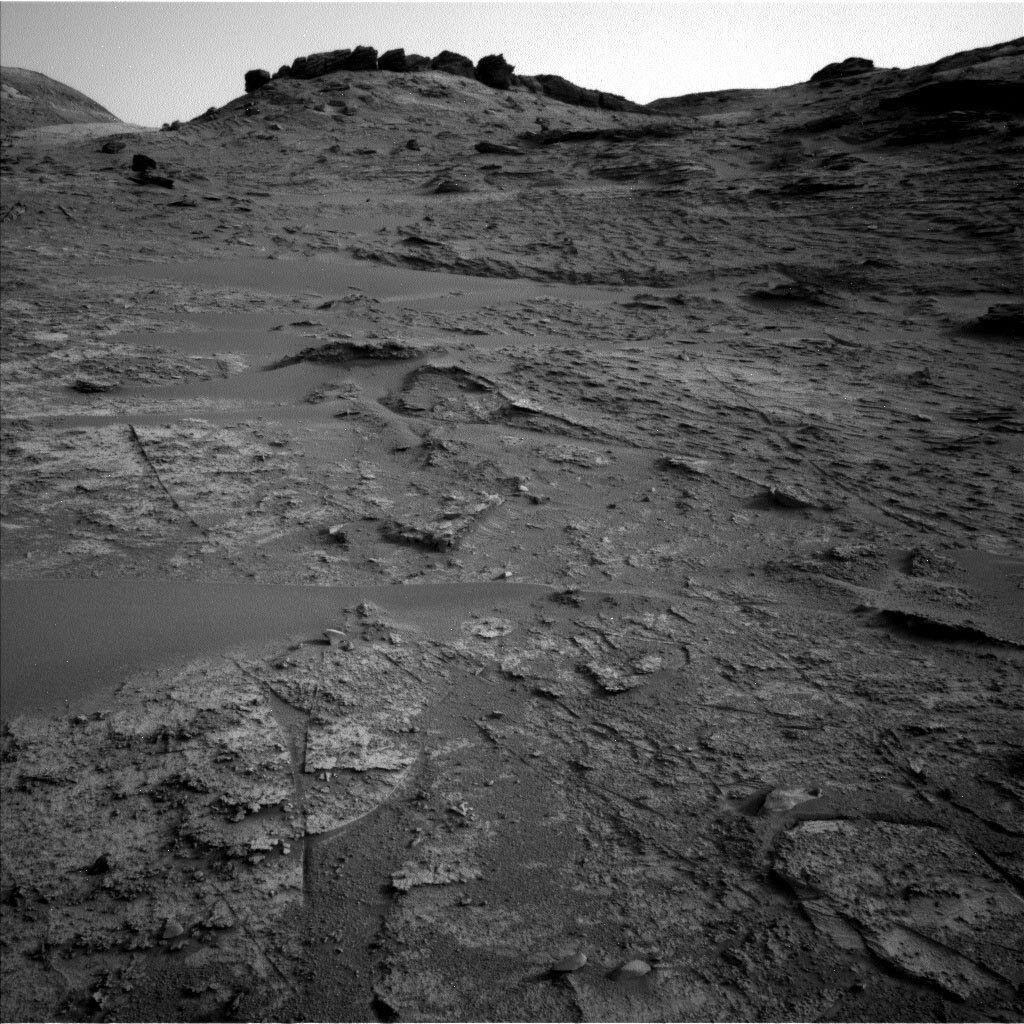
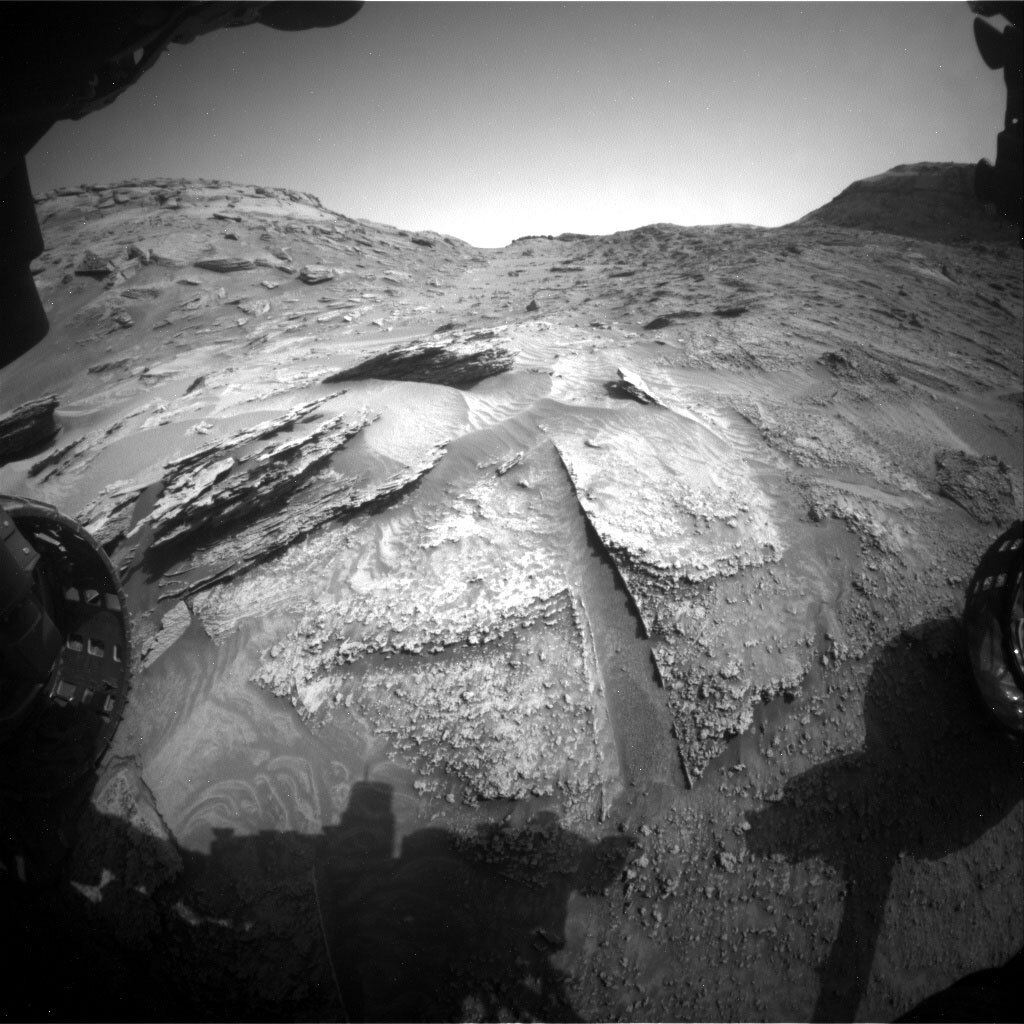
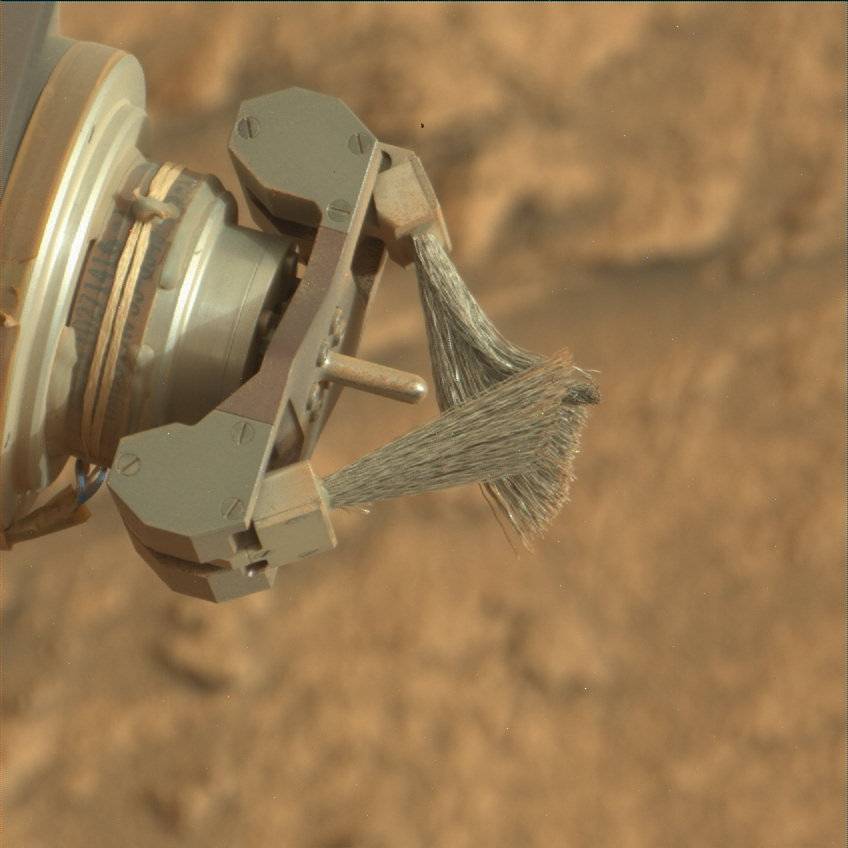
Curiosity continues to navigate challenging terrain. The drive executed over the weekend moved us 8 m from our previous location. Prior to the weekend drive, we completed contact science with APXS and MAHLI on targets "Pedra Pintada" and "San Pedro," the latter of which was brushed with the Dust Removal Tool (DRT) to remove thin airfall dust that was coating the surface of the rock face. Dust is rather ubiquitous on Mars, not only coating rocks and regolith but also spacecraft hardware as seen in numerous selfies taken at Gale, Jezero, and Elysium Planitia. In this past weekend plan's blog, "A Different Perspective on Mirador Butte," Dr. Schwenzer noted how Curiosity continually monitors its environment, including tracking the abundance of atmospheric dust. When that dust settles on rocks, it can partially mask the chemistry and surface texture of these rocks from APXS and MAHLI in particular. Brushing rock surfaces with the DRT is not always possible, but it does improve scientific assessments of these surfaces. To keep tabs on the health of the DRT, we take Mascam images periodically, including in this past weekend's plan.
Download image ›
Today's two-sol plan started with a discussion about whether we should include an APXS touch-and-go (T&G) measurement in our new workspace. APXS T&Gs are short measurements, typically 15-20 minutes long, conducted as soon as possible after the rover wakes up but before it drives. The rover "touches" the surface of a rock with the APXS, conducts an APXS analysis (and often acquires MAHLI images), stows the arm, and drives (i.e., "Gos"), all before a data relay in the afternoon that shepherds critical data to Earth in a timely fashion. Currently, however, we are approaching martian summer solstice in the southern hemisphere and temperatures can be rather balmy, with recent daily highs above 0 C (32 F). While APXS prefers cold temperatures (classic Canadian instrument, eh?), and has the ability to cool itself, we have noticed with recent APXS T&Gs that morning temperatures have been less than ideal and have resulted in a reduction in spectral resolution - essentially blurring elemental peaks together and increasing analytical uncertainty. With this in mind, and given the quality of and short distance from our previous bedrock chemical analyses (Pedra Pintada and dust-cleared San Pedro), the decision was made to forego APXS at this site in favour of extending the drive and freeing up resources for additional imaging activities.
The first sol of the plan kicks off with a DAN passive activity whereby DAN utilizes neutrons produced via interactions between galactic cosmic rays and the martian atmosphere to investigate potential subsurface hydration using hydrogen content as a proxy. ChemCam laser analyses of "Los Caribes" are complemented by ChemCam RMI and Mastcam images. Additional Mastcam images are acquired on targets "Aratana," "Jawalla," "Aranka," and "Rupununi." We also utilize MAHLI to snap three images of Aratana before we stow the arm and commence an early afternoon drive. Post-drive activities on the first sol include a DAN active experiment, with DAN generating its own neutrons to look for subsurface hydrogen.
On the second sol, the plan includes a ChemCam AEGIS activity, where the rover selects its own targets to investigate with the ChemCam laser. This activity is well-suited for post-drive use as it can be conducted autonomously. The star of the sol, however, is an overnight dual enrichment methane experiment by SAM. This experiment has been run before and helps us characterize methane in the martian atmosphere by comparing a methane-enriched sample to one without any enrichment. Throughout both sols, Curiosity will continue with its regular cadence of climate monitoring with REMS.